机构名称:
¥ 1.0
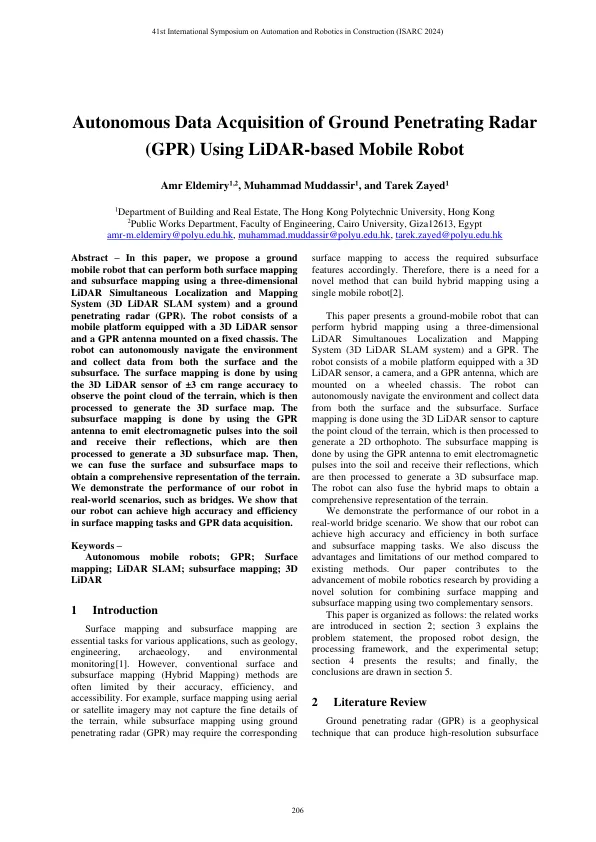
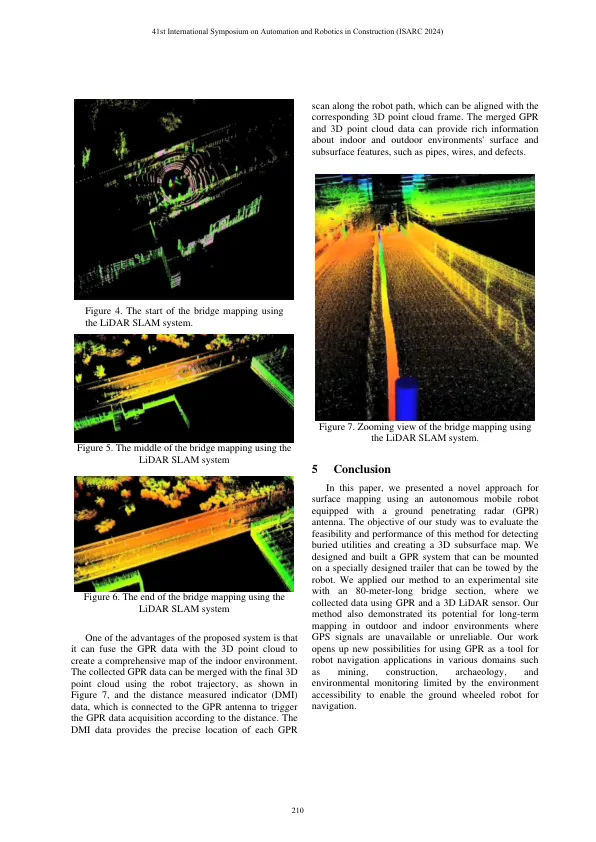
2 Public Works Department, Faculty of Engineering, Cairo University, Giza12613, Egypt amr-m.eldemiry@polyu.edu.hk , muhammad.muddassir@polyu.edu.hk , tarek.zayed@polyu.edu.hk Abstract – In this paper, we propose a ground mobile robot that can perform both surface mapping and subsurface mapping using三维激光雷达同时定位和映射系统(3D激光雷达大满贯系统)和地面穿透雷达(GPR)。机器人由配备3D激光雷达传感器的移动平台和安装在固定机箱上的GPR天线组成。机器人可以自主浏览环境并从表面和地下收集数据。表面映射是通过使用±3 cm范围精度的3D激光镜传感器来观察地形的点云,然后对其进行处理以生成3D表面图。地下映射是通过使用GPR天线将电磁脉冲发射到土壤中并接收反射的,然后对其进行处理以生成3D地下图。然后,我们可以融合表面和地下图以获得地形的全面表示。我们在现实世界中(例如桥梁)演示了机器人的性能。我们表明,我们的机器人可以在表面映射任务和GPR数据采集中实现高精度和效率。
地面穿透雷达的自主数据获取...
主要关键词



相关文件推荐