机构名称:
¥ 1.0
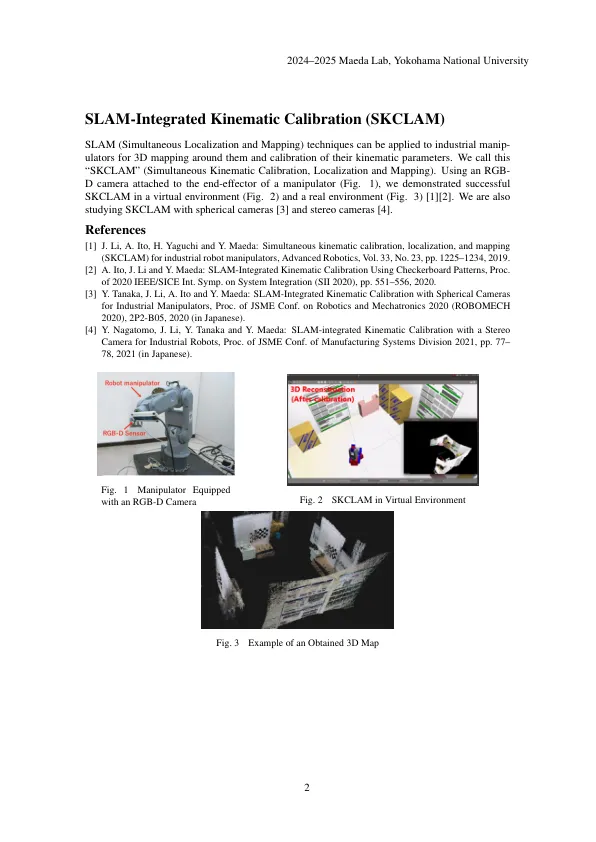
参考文献[1] J. Li,A。Ito,H。Yaguchi和Y. Maeda:工业机器人操作器的同时进行运动学校准,定位和映射(SKCLAM),Advanced Robotics,第1卷。33,编号23,pp。1225–1234,2019。[2] A. Ito,J。Li和Y. Maeda:使用棋盘格式的猛击综合运动学校准,Proc。2020 IEEE/sice int。sammp。系统集成(SII 2020),pp。551–556,2020。[3] Y. Tanaka,J。Li,A。Ito和Y. Maeda:用球形摄像机用于工业操纵器的猛击综合运动型校准,Proc。JSME Conf。 关于机器人技术和机电一体化2020(Robomech 2020),2p2-B05,2020(日语)。 [4] JSME Conf。 制造系统部门2021,pp。 77–78,2021(日语)。JSME Conf。关于机器人技术和机电一体化2020(Robomech 2020),2p2-B05,2020(日语)。[4]JSME Conf。 制造系统部门2021,pp。 77–78,2021(日语)。JSME Conf。制造系统部门2021,pp。77–78,2021(日语)。
MAEDA实验室:2024–2025
主要关键词


相关文件推荐