机构名称:
¥ 1.0
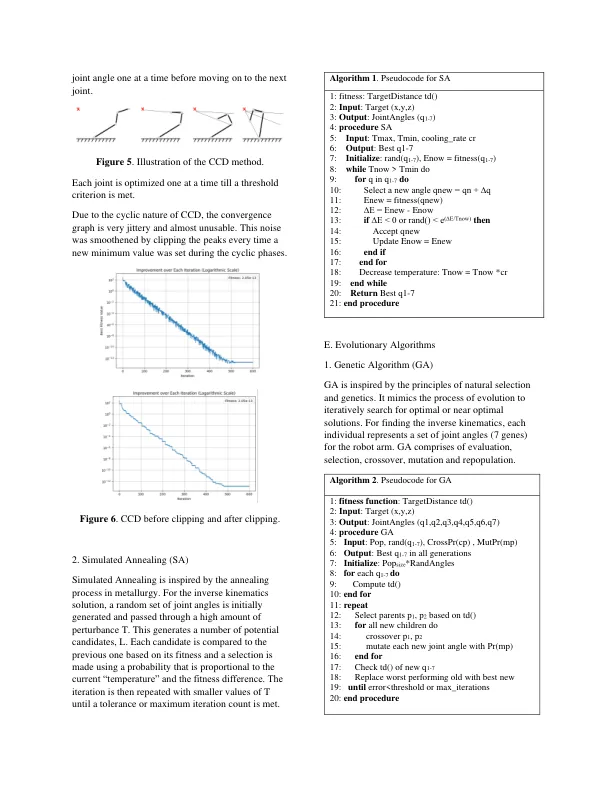
随着AI技术的速度继续加速,研究人员可以使用更多的工具来解决长期存在的问题,今天可用的混合方法继续推动效率和精度的计算限制。这样的问题之一是冗余系统的逆运动学。本文探讨了7度自由操纵器的复杂性,并探讨了13种优化技术来解决它。此外,提出了一种新的方法来有助于算法研究领域。发现这比著名的传统粒子群优化技术快200倍。这种新方法可以用作新的搜索领域,将机器学习的探索性功能与数值方法的剥削能力相结合。
用于解决的机器学习和优化技术
主要关键词




相关文件推荐