机构名称:
¥ 1.0
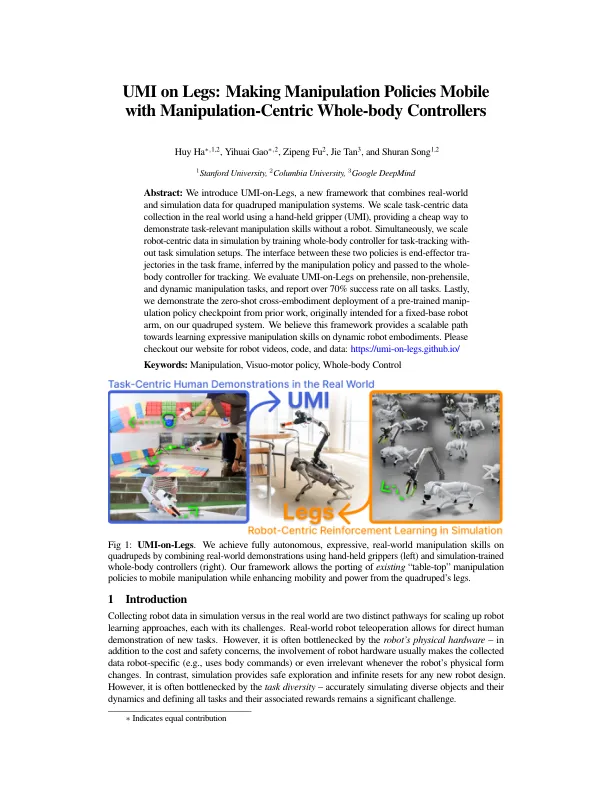
摘要:我们介绍了Umi-On-Legs,这是一个新框架,结合了四倍的操纵系统的真实世界和仿真数据。我们使用手持抓手(UMI)在现实世界中以任务为中心的数据收集,这提供了一种廉价的方式来展示与任务相关的操纵技巧,而无需机器人。同时,我们通过训练与任务仿真设置的任务跟踪训练全身控制器在模拟中缩放以机器人为中心的数据。这两个策略之间的接口是任务框架中的最终效应器传播,由操作策略推断,并传递给整体控制器进行跟踪。我们评估了对智力,非划算和动态操纵任务的UMI-ON-LEGS,并在所有任务上报告超过70%的成功率。最后,我们证明了先前工作中预先训练的操作策略检查站的零射击横界部署,该检查点最初是针对我们的四足动物系统在我们的四足动物系统上的。我们认为,该框架为学习动态机器人实施方案学习表达性操纵技能提供了可扩展的途径。请查看我们的网站,以获取机器人视频,代码和数据:https://umi-on-legs.github.io/
umi腿上:以以操纵为中心的全身控制器使操纵策略移动
主要关键词




相关文件推荐