机构名称:
¥ 1.0
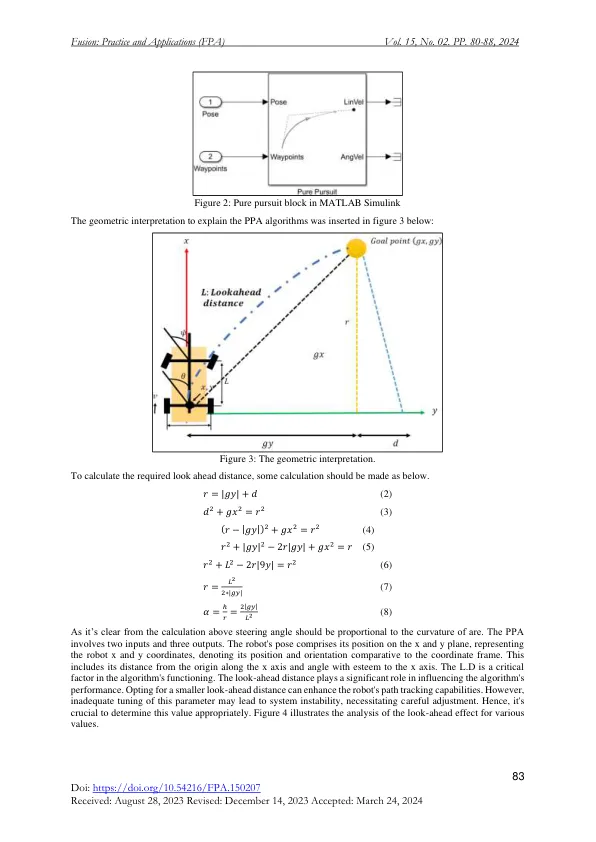
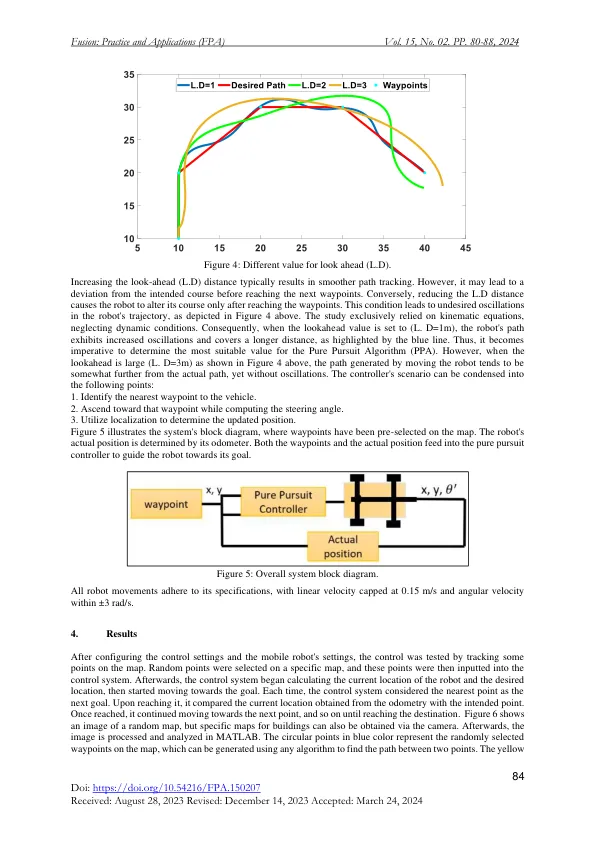
在本文中使用了纯追求算法(PPA)来解释四个轮子的汽车如何移动。MATLAB环境具有广泛的模拟功能,可以准确地代表复杂的机器人行为。是这些部署的是对机器人操作动力学的扩展分析。在MATLAB/SIMULINK框架中,从不同算法获得的航路点定义了机器人轨迹。一个里程表传感器有助于本地化机器人,从而在其位置上提供了准确的实时信息。在批判性地评估了几个性能指数之后,很清楚该控制算法的工作状况如何,因为它将机器人从初始状态顺利移动到其目标,几乎完全没有振荡。模拟的发现确认,如果选择了适当的lookahead距离,那么机器人可以有效地跟踪航路点并沿着轨迹保持最佳路径,直到终于到达目标点
四轮手机的纯追求控制器策略...
主要关键词



相关文件推荐