机构名称:
¥ 1.0
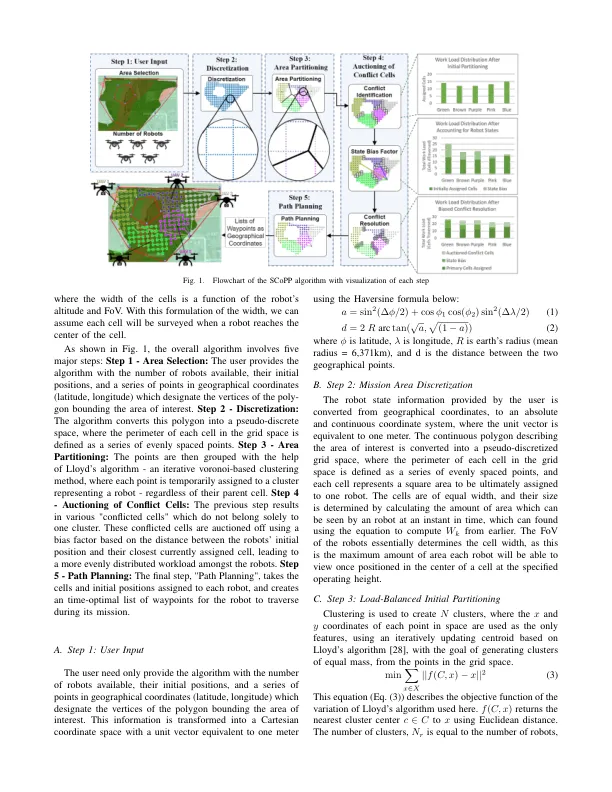
摘要 — 本文介绍了一种新颖的多机器人覆盖路径规划 (CPP) 算法 - 又名 SCoPP - 该算法提供了一种时间高效的解决方案,根据多机器人系统中的每个机器人的初始状态,为其提供工作负载平衡的计划。该算法考虑了指定关注区域中的不连续性(例如,禁飞区),并使用离散的、计算效率高的最近邻路径规划算法为每个机器人提供了优化的有序路径点列表。该算法涉及五个主要阶段,包括将用户输入转换为地理坐标中的一组顶点、离散化、负载平衡分区、在离散空间中拍卖冲突单元以及路径规划程序。为了评估主要算法的有效性,考虑了多无人机 (UAV) 洪灾后评估应用,并在三个不同大小的测试地图上测试了该算法的性能。此外,我们还将我们的方法与 Guasella 等人创建的最新方法进行了比较。进一步分析了 SCoPP 的可扩展性和计算时间。结果表明,SCoPP 在任务完成时间方面更胜一筹;对于一个由 150 个机器人组成的团队覆盖的大地图,其计算时间不到 2 分钟,从而证明了其计算可扩展性。
多机器人可扩展覆盖路径规划... - NSF PAR
主要关键词




相关文件推荐