机构名称:
¥ 1.0
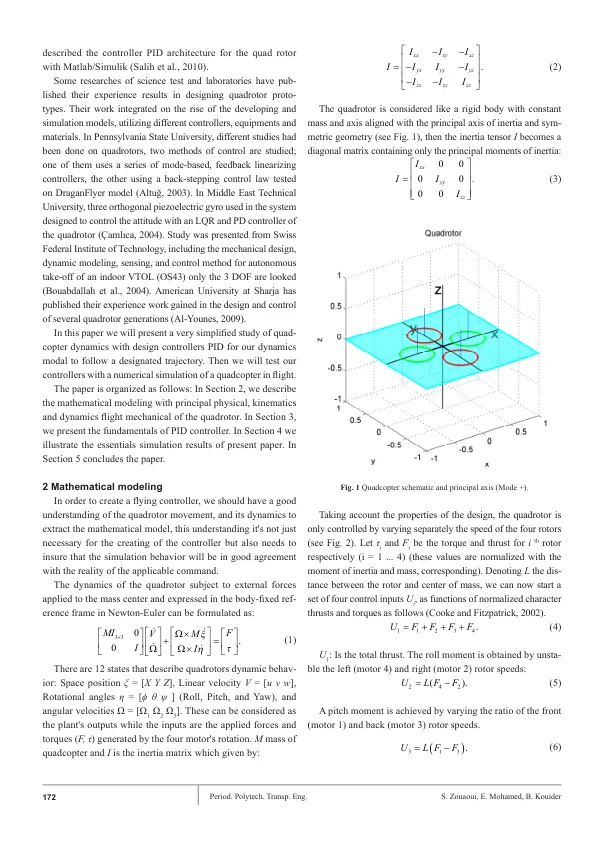
摘要 本文的主要目的是设计一个数学模型来估计由三种算法控制的四电机(四轴飞行器)飞行机器人的行为;P 取决于当前误差;I 取决于过去误差的累积,D 用简单的策略预测未来误差(PID 控制器设计)。在这方面,提出了一种基于牛顿欧拉刚体动力学公式的运动控制方程。为了设计控制算法,我们做出了一些假设,例如忽略叶片拍打、周围流体速度。这种参数排除使模型灵活、简单,并且允许控制更高效、更易于设计,而无需昂贵的计算。使用 MATLAB 程序进行模拟研究。
使用 PID 控制器轻松跟踪无人机
主要关键词


相关文件推荐