XiaoMi-AI文件搜索系统
World File Search Systemsimulink

基于视觉的自动着陆系统的伪造
在没有仪表进近或先进设备的小型机场,飞机自动着陆是一项安全关键任务,需要使用飞机上的传感器。在本文中,我们研究使用摄像头作为主要传感器的固定翼飞机自动着陆系统的伪造。我们首先介绍一种基于视觉的自动着陆架构,包括基于视觉的跑道距离和方向估计器以及相关的 PID 控制器。然后,我们概述了使用实际飞行数据验证的着陆规范。使用这些规范,我们建议使用伪造工具 Breach 来查找自动着陆系统中规范的反例。我们的实验是使用 X-Plane 飞行模拟器中的 Beechcraft Baron 58 与 MATLAB Simulink 通信实现的。

使用铅控制飞机的俯仰... - Ijcrt.org
______________________________________________________________________________________________ 摘要:本文介绍了使用超前补偿器和模糊控制器对纵向平面的飞机进行控制。飞行系统的设计需要线性化的纵向动力学数学模型。超前补偿器具有超前网络的特性,可改善系统的瞬态响应。为了控制俯仰角,使用 Matlab - simulink 模型来调整补偿器,并使用 Mamdani 型模糊逻辑控制器 (S.N.Deepa 和 Sudha G.2014) 通过模拟选择适当的模糊规则来调整参数。模拟结果以时域规范的形式呈现,并基于阶跃响应分析了性能。进行比较以确定哪种控制策略可以更好地响应所需的俯仰角。索引术语 - 模糊控制器、超前补偿器、纵向动力学、飞机。 ______________________________________________________________________________________________
线性二次高斯控制系统的设计...
有几种不同类型的控制方法可用于线性和非线性系统。这些控制方法需要简单到复杂的控制器。在本项目中,通过获取状态空间模型并检查不同控制方法的开环和闭环响应来分析无尾翼火箭的俯仰稳定性。此外,根据线性二次调节器 (LQR) 的响应评估了简单但强大的比例、积分、微分 (PID) 控制器的响应。由于实际应用和案例的局限性,开发了卡尔曼滤波器 (最佳估计器) 来充分观察和获取必要的状态变量。最终,将 LQG 和卡尔曼滤波器结果和增益结合起来以获得线性二次高斯 (LQG) 控制器响应。每个部分都将定义、推导和实现必要的函数到 MATLAB 和 Simulink 中以获得最佳响应。

电动汽车隔离的板载充电器的新颖设计
摘要:根据不断扩大的环境问题和不断加强的排放法规,已经研究了电动汽车作为一种运输形式的有效性。电动汽车电池充电器拓扑对于增加电动汽车(EV)的使用至关重要。该研究的电动汽车上的板载电池电池充电器支持SEPIC,谐振逆变器或LLC拓扑,适用于带有48V电池组的附近电动型自行车。为了获得最少的电网电流纹波,还建议使用自适应DC链路电压技术来实现所有电压条件下适当的DC链路电压。充电器还采用了电压同步策略,以确保网格连接和独立模式之间的无缝模式过渡。MATLAB/SIMULINK用于模拟和验证车载充电器。

基于 Quine-McCluskey 的从可逆量子电路生成最佳组合逻辑电路的方法
专为量子计算机设计的算法已经开发出来。在量子电路中,使用 Feynman、Toffoli 和 Fredkin 门代替组合逻辑门中的传统输入,例如 AND、OR、NAND、NOR、XOR 和 XNOR。将量子电路转换为组合逻辑电路或反之亦然的能力至关重要。本论文研究(或论文)旨在展示从可逆量子电路派生组合逻辑电路的过程。为此,利用 Quine-McCluskey 技术以及从量子电路生成的状态表来获得最佳逻辑表达式,作为构建组合逻辑电路的基础。在 MATLAB Simulink 环境中实现了由此得到的组合逻辑电路,并获得了状态表。对从量子电路和组合电路派生的状态表进行了比较,获得了成功的结果。

混合能源(太阳能+风能)的 MATLAB 仿真...
简要回顾了它们的设计、建模、仿真和优化的现状。还进行了相应的分析。最后,总结了未来的研究和开发趋势。能源数量是决定 HSRES 复杂性以及可持续性和效率的因素之一。大量的能源使系统更加复杂,但同时也提高了可持续性和能源效率。对于家庭来说,这是一种减少(如果不是结束的话)挥之不去的国家能源危机的方法。对于像我们这样的一代人来说,污染也是化石燃料枯竭的主要问题,我们需要找到不同的能源生产方法,将污染降至最低,产生的电力足以应对危机。在 MATLAB simulink R2017a 上完成了基于可再生能源和不可再生能源单元集成的混合动力系统的建模模型以及连接到电网时的仿真。
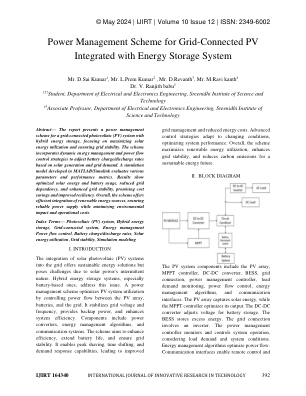
并网光伏电源管理方案...
摘要—本报告介绍了一种用于电网连接的光伏 (PV) 系统与混合能源存储的电源管理方案,重点是最大限度地利用太阳能并确保电网稳定性。该方案结合了动态能源管理和电力流控制策略,可根据太阳能发电和电网需求调整电池充电/放电率。在 MATLAB/Simulink 中开发的仿真模型评估了各种参数和性能指标。结果表明,太阳能和电池的使用得到了优化,电网依赖性降低,电网稳定性增强,有望节省成本并提高弹性。总体而言,该方案可有效整合可再生能源,确保可靠的电力供应,同时最大限度地减少环境影响和运营成本。
多级当前充电系统设计和分析...
由于其较高的能量密度,更长的寿命和优质的功率密度,锂电池已成为近年来电动汽车(EV)开发的主要能源。在电池上运行的车辆需要快速有效地充电。在填充汽油动力汽车的同时,只需几分钟,就可以从四到六个小时内收取电动汽车(EV),具体取决于C速率。在这项研究中,对两轮电动汽车的多电流充电机制进行了建模和模拟。建议的技术通过闭合环控制器通过降压转换器功率调节电路得出充电电流。在MATLAB/SIMULINK环境中模拟电路以验证建议的充电方法。然后将结果与恒定电流(CC)和恒定电流恒定电压(CC-CV)充电方法进行比较。

使用被动小区平衡的电池组的系统建模和仿真分析
摘要:本文介绍了使用被动细胞平衡技术对锂电池组的系统建模和模拟。在MATLAB/SIMULINK环境中对57.6 V,27 AH的电池组进行了建模和模拟。每当串联连接细胞模块的电荷状态(SOC)的差异超过SOC的0.1%的阈值时,平衡算法就会触发。平衡算法还提供了分流电阻值的最佳值,该值是根据为平衡细胞和最小功率消耗所花费的时间选择的。获得了平衡时间和功耗与电阻值的图。将4Ω的分流电阻作为一组电阻的最佳值,因为其平衡时间为9636.9s,功率损耗为26.2462W是令人满意的。使用恒定充电恒电压(CC-CV)方法在充电阶段分析了电池组的性能,并在20A的恒定电流下放电。

双臂架固定翼无人机实时控制算法...
摘要 - 无人驾驶飞行器 (UAV) 已广泛应用于经济、安全、军事等许多领域,包括空中拍摄、交通状态更新、在建建筑监视和娱乐……如今,无人机研究是最受关注的领域,尤其是在自主控制器方面。在本文中,我们提出了一种用于倒 V 型尾翼配置的固定翼无人机的实时控制算法模型,包括自动起飞阶段、航路点跟踪阶段和自动着陆阶段。该算法是在 matlab/simulink 上构建为标准化模型,并使用 PID 控制器进行实现。使用 X-Plane 模拟算法的性能 - X-Plane 是由 Laminar Research 开发并由美国联邦航空管理局 (FAA-USA) 认证用于训练飞行员的模拟器,它能够使用实时数据和最高精度进行模拟飞行