XiaoMi-AI文件搜索系统
World File Search System过多步

大脑在多步预期过程中以层次化的方式呈现过去和未来
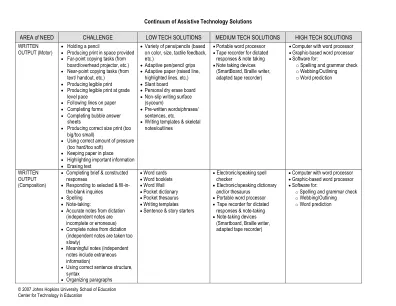
环境在各个序列中是不同的。参与者总共学习了四个序列:一条绿色和蓝色路径,包含一组八个环境,另一条绿色和蓝色路径,包含一组不同的八个环境。为了便于说明,这里只描绘了一条绿色和一条蓝色路径。(b)故事生成。为了学习环境的顺序,参与者为每条路径生成故事,以按顺序链接环境。参与者被告知将最终环境链接回第一个环境以创建一个循环。(c)虚拟现实训练。参与者随后在沉浸式虚拟现实中以绿色路径顺序和蓝色路径顺序探索环境,同时排练他们的故事。在给定的环境中,会出现一个绿色和蓝色的球体。触摸这些球体时,参与者会按照相应的(绿色或蓝色)序列传送到下一个环境。然后,参与者回忆起四个序列中的每一个的顺序(未显示)。环境图像是游戏引擎 Unity 中从可用于商业用途的资产创建的 3D 环境的屏幕截图。

大脑在多步预期过程中以层次化的方式呈现过去和未来
时间结构的记忆既可以规划未来事件,也可以回顾过去事件。我们研究了大脑在预期过程中如何灵活地表示过去和未来的扩展时间序列。参与者在沉浸式虚拟现实中学习环境序列。序列对具有相同的环境,但顺序不同,从而实现特定于上下文的学习。在 fMRI 期间,参与者以给定的顺序预测未来多个步骤的即将到来的环境。时间结构在海马体和高阶视觉区域中以 (1) 双向表示,具有对过去和未来的分级表示和 (2) 分层表示,过去和未来的进一步事件在连续更靠前的大脑区域中表示。在海马体中,这些双向表示是特定于上下文的,而对遥远环境的抑制可以预测预期中的响应时间成本。总之,这项工作揭示了我们如何灵活地表示顺序结构以实现跨多个时间尺度的规划。

多步工程腺相关病毒启用全脑mRNA递送
摘要:腺相关病毒(AAV)是基因治疗中DNA递送的常用载体。在这里,我们开发了一个系统,该系统可以通过多步介绍RNA包装组件和AAV REP蛋白的修改来包装mRNA。由此产生的携带mRNA AAVS(RAAVS)保留了常规AAV的大多数特性,包括衣壳组成,病毒形态和组织端主。这些RAAV可以介导mRNA转移到靶细胞和组织中,从而导致功能蛋白的短暂表达。重要的是,静脉注射的RAAV有效地越过了血脑屏障(BBB)并感染了整个小鼠大脑。因此,可以修改DNA病毒载体以进行RNA递送,我们的RAAV代表了第一个高效的BBB跨mRNA递送系统,可通过全脑感染用于治疗目的。

使用化学合成规划器进行计算机辅助多步化学酶逆合成
对于一些合成化学家来说,在有机化学和酶化学界面处挖掘优势是一项挑战。化学酶合成规划工具可以有效地帮助识别小分子制造中的生物催化机会。计算机辅助合成规划 (CASP) 中的逆合成技术通过从目标开始并递归选择适当的断开连接,提出了从可用起始材料到目标的可行多步合成路线。从 50 多年前提出的有机化学早期 CASP 工具开始,7,8 这些方法已经得到改进,可以使用基于规则的方法和机器学习来概括已知反应,从而预测达到所需目标的实际有机合成路线。9 – 11 酶逆合成的最新发展显示出为酶开发类似的 CASP 工具的巨大潜力。12 – 15 Finnigan 等人最近整理了一小组经过专业编码的反应规则来描述用于生物催化的酶工具箱。 13 这些反应规则隐含地反映了不同酶类已确定的底物混杂性。这些规则所代表的酶已被证明在许多情况下适合酶工程,以接受新的底物。13 此外,它们还被成功地用于规划针对目标分子的生物催化级联。尽管 RetroBioCat 成功地规划了多步酶促途径,但它无法提出针对所需目标的化学酶促途径,该途径协同涉及有机和酶促方法。

人工胰腺模型预测控制(MPC),具有数据驱动的多步 - 先前的血糖预测因子
我们介绍了闭环胰岛素输送算法的设计和内部评估,用于处理1型糖尿病(T1D),该糖尿病(T1D)由数据驱动的多步进血糖(BG)预测因子集成到线性时间变化(LTV)模型预测控制(MPC)框架中。我们建议通过可用数据识别葡萄糖调节系统的开环模型,而是建议将整个BG预测拟合在MPC中使用的预定义预测范围,作为过去输入 - IPUT数据的非线性函数,以及未来胰岛素控制输入的FFI NE功能的非线性函数。对于非线性部分,提出了一个长的短期内存(LSTM)网络,而对于A ffi Ne组件,选择了线性回归模型。与传统的线性MPC相比,基于从数据确定的外源性(ARX)输入模型的自动回归的传统线性MPC相比,我们评估了在三种模拟场景中提出的LSTM-MPC控制器:每天的标称案例,每天有3顿饭,每天的饮食措施是一个随机的进餐情况,与最近出版的饮食中的餐饮造成了25%的股份和25%的股份,并与25%的造成了一份,并与25%的造成了一份。此外,在所有情况下,都没有给予前喂食推注。我们的方法提供了对整个MPC控制器的未来葡萄糖浓度和良好闭环性能的准确预测。For the more challenging random meal generation scenario, the mean ± standard deviation percent time in the range 70-180 [mg / dL] was 74.99 ± 7.09 vs. 54.15 ± 14.89, the mean ± standard deviation percent time in the tighter range 70-140 [mg / dL] was 47.78 ± 8.55 vs. 34.62 ± 9.04, while the mean ± standard严重低血糖的偏差百分比百分比,即,对于我们提出的LSTM-MPC控制器和传统的ARX-MPC,<54 [mg / dl]对9.45±11.71为1.00±3.18。

经实验验证的多步模拟策略可预测激光冲击喷丸后残余应力场中的疲劳裂纹扩展速率
对于损伤容限设计 [1] 来说,疲劳和腐蚀是航空工业 [2] 中两个主要故障原因。激光冲击喷丸 (LSP) 是一种表面处理技术,可在易受疲劳现象影响的关键区域引入具有较大穿透深度的压缩残余应力。这些压缩残余应力可能导致疲劳裂纹扩展 (FCP) 延缓,如由 AA2024-T3 [3] 组成的 M(T) 试样或搅拌摩擦焊接的 AA7075-T7351 [4] 所示。然而,压缩残余应力的产生总是会导致结构内的拉伸残余应力以保持应力平衡。这些拉伸残余应力可能会导致 FCP 速率加速。因此,准确了解施加的残余应力场并预测由此产生的 FCP 速率对于保证有效且优化地应用 LSP 是必要的。 FCP 模拟中常用的一种策略是计算疲劳载荷循环的最小和最大应力强度因子,并将这些应力强度因子用作 FCP 方程的输入 [5–8] 。所应用的 FCP 方程将裂纹尖端的应力强度因子与 FCP 速率联系起来。这项工作应用了 Paris 和 Erdogan [9] 开发的第一个 FCP 方程、Walker 方程 [10] ,例如,该方程在激光加热引起的残余应力场中成功应用 [11] ,以及 NASGRO 方程 [12] ,该方程现在

考虑内部电阻和容量再生现象的可转移的长期锂离子电池老化轨迹预测模型
准确预测锂离子电池(LIB)的剩余使用寿命(RUL)对于改善电池管理系统设计和确保设备安全至关重要。然而,由于多步预测中的多步中的错误积累,实现衰老轨迹的准确长期预测是具有挑战性的。这项研究表明,考虑与衰老过程有关的未来内部阻力(R)以及在衰老期间发生的能力再生现象(CRP)可以帮助减少误差的积累。具体来说,我们提出了一种混合方法,该方法结合了未来的R和CRP,以预测LIB的衰老轨迹和统治。实验结果证明:(1)对于相同的充电/放电策略和电池类型,提出的方法可以准确预测衰老轨迹,并仅使用前20个周期的数据(约占完整数据的5%); (2)对于不同的充电/放电策略和电池类型,通过转移学习,提出的方法可以使用前40个周期的数据来预测老化轨迹和RUL。这些结果表明,在长期预测中提出的模型既准确又是鲁棒,可以估算各种数据集的老化轨迹和RUL。