机构名称:
¥ 1.0
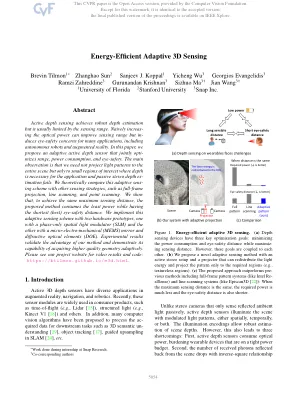
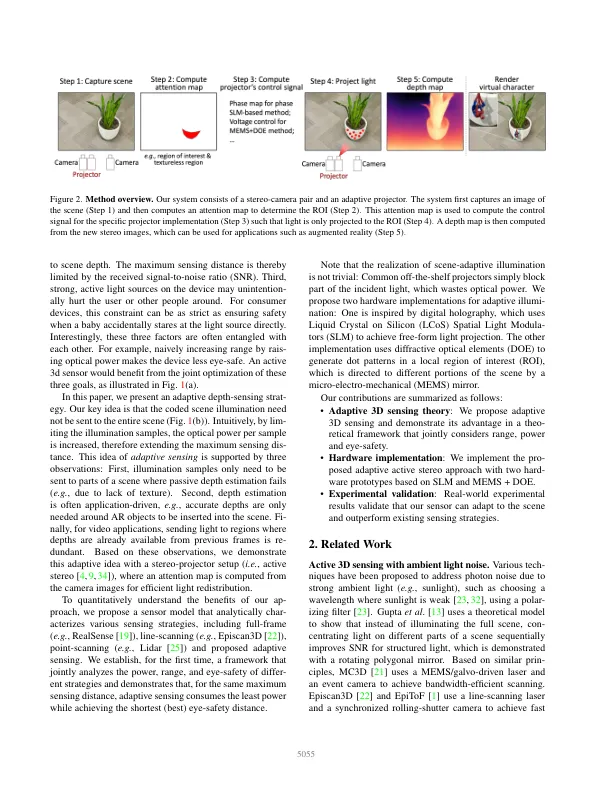
主动深度传感可实现强大的深度估计,但通常受感应范围的限制。天真地增加光学能力可以改善传感范围,但对许多应用(包括自主机器人和增强现实)的视力安全关注。在本文中,我们提出了一个自适应的主动深度传感器,该传感器可以共同介绍范围,功耗和眼部安全。主要观察结果是,我们不需要将光模式投影到整个场景,而只需要在关注的小区域中,在应用程序和被动立体声深度所需的深度失败的情况下。理论上将这种自适应感知方案与其他感应策略(例如全帧投影,线扫描和点扫描)进行了比较。我们表明,为了达到相同的最大感应距离,提出的方法在最短(最佳)眼部安全距离时会消耗最小的功率。我们用两个硬件原型实现了这种自适应感测方案,一个具有仅相位空间光调制器(SLM),另一个带有微电动机械(MEMS)镜像和衍射光学元素(DOE)。实验结果验证了我们方法的优势,并证明了其能力自适应地获得更高质量的几何形状。请参阅我们的项目网站以获取视频结果和代码:
节能自适应3D传感-CVF开放访问
主要关键词



相关文件推荐