机构名称:
¥ 2.0
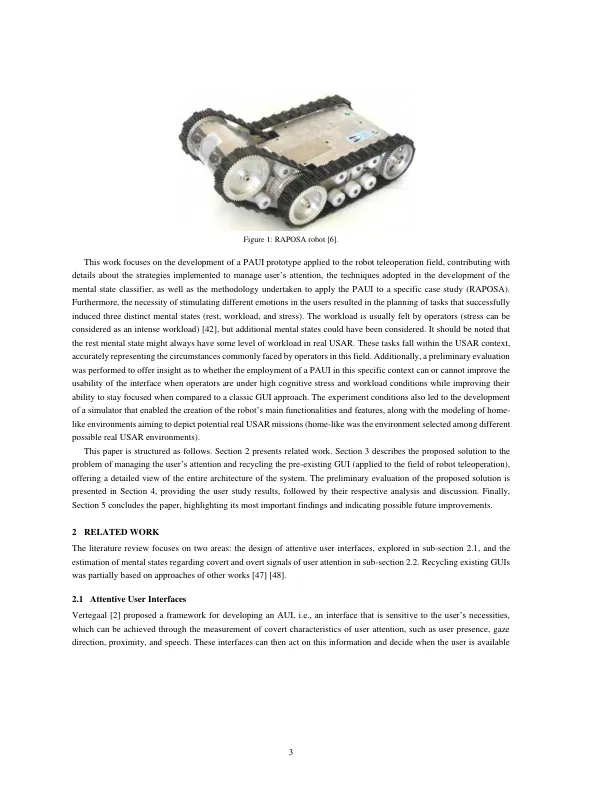
用户界面(UI)正在从渴望注意力转变为互动时用户的需求。为机器人远距离开发的接口可能特别复杂,通常会显示大量信息,这可能会增加损害操作员性能的认知超负荷。本文介绍了与六名参与者评估的生理学细心用户界面(PAUI)原型的开发。一项关于城市搜救和救援(USAR)操作的案例研究,尽管拟议的方法旨在通用,但使用了totopopopoping机器人。机器人考虑的提供了过于复杂的图形用户界面(GUI),该界面不允许访问其源代码。这代表了机器人仍在使用时的经常性和挑战性的情况,但是不再提供技术更新,通常意味着它们放弃。该方法的主要贡献是可以回收旧系统的同时改进可用于最终用户的UI并考虑输入其生理数据。所提出的PAUI分析生理数据,面部表情和眼动,以对三种精神状态进行分类(休息,工作量和压力)。然后,通过回收现有的GUI来组装细心的用户界面(AUI),该GUI根据预测的心理状态进行动态修改,以在精神苛刻的情况下提高用户的重点。初步用户评估的结果表明,由于受试者的数量减少,尽管没有统计学意义,但PAUI使用的有用性和易用性的趋势。除了利用先前存在的GUI的拟议的Pauis的新颖性外,这项工作还助长了一个用户实验的设计,该实验包括精神状态诱导任务,这些任务成功触发了高和低认知过载状态。
repositórioiscte-iul
主要关键词



相关文件推荐