机构名称:
¥ 1.0
引用本文: 于乃功, 谢秋生, 李洪政.基于点云处理的仿人机器人楼梯障碍物识别与剔除方法[J].北科大:工程科学学报 , 2025, 47(2): 339-350. doi: 10.13374/j.issn2095-9389.2024.05.10.001 YU Naigong, XIE Qiusheng, LI Hongzheng.Obstacle recognition and elimination method for humanoid robots based on point cloud processing[J].Chinese Journal of Engineering , 2025, 47(2): 339-350. doi: 10.13374/j.issn2095-9389.2024.05.10.001
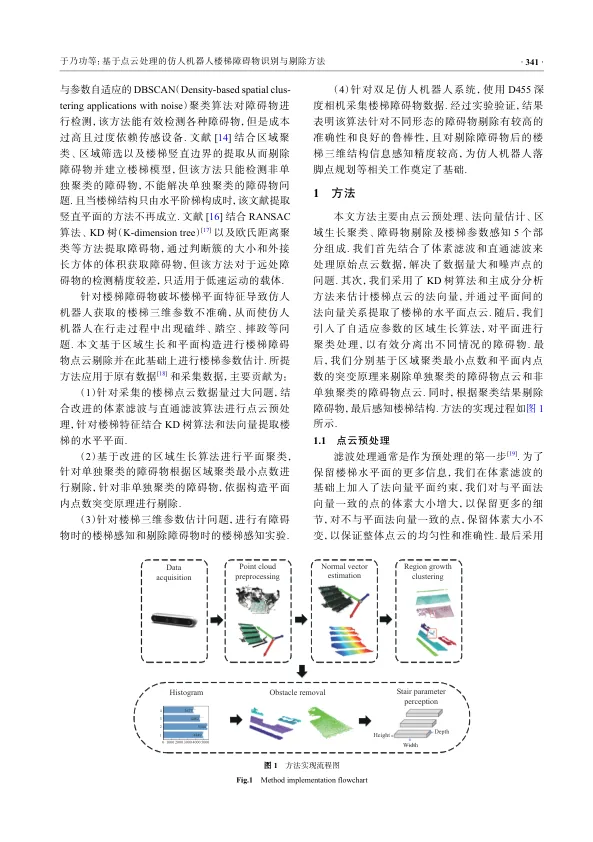
基于点云处理的仿人机器人楼梯障碍物识别与剔除方法
主要关键词



相关文件推荐