机构名称:
¥ 1.0
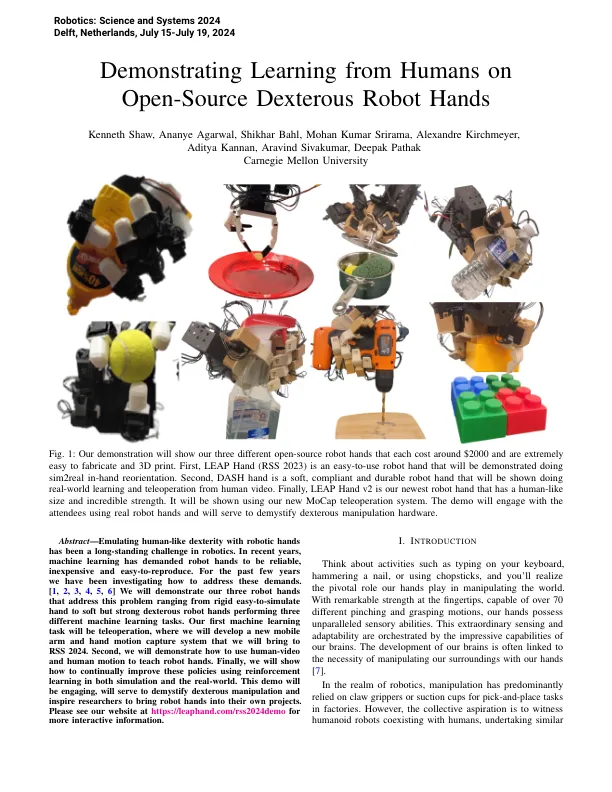
摘要 - 用机器人手发出类似人类的灵活性一直是机器人技术的长期挑战。近年来,机器学习要求机器人手要可靠,便宜且易于制作。在过去的几年中,我们一直在研究如何满足这些要求。[1,2,2,3,4,5,6]我们将演示我们的三只机器人手来解决此问题,从易于仿真的手到柔软但坚固的灵巧的机器人手,执行三个不同的机器学习任务。我们的第一个机器学习任务将是远程运行,我们将开发一个新的移动手臂和手动捕获系统,我们将带给RSS 2024。第二,我们将演示如何使用人类视频和人类运动来教机器人手。最后,我们将展示如何在模拟和现实世界中使用强化学习不断改进这些政策。该演示将参与其中,将使灵巧的操纵脱颖而出,并激发研究人员将机器人手带入自己的项目。请访问我们的网站https://leaphand.com/rss2024demo,以获取更多交互式信息。
在开源灵巧的机器人手中向人类学习
主要关键词



相关文件推荐