机构名称:
¥ 1.0
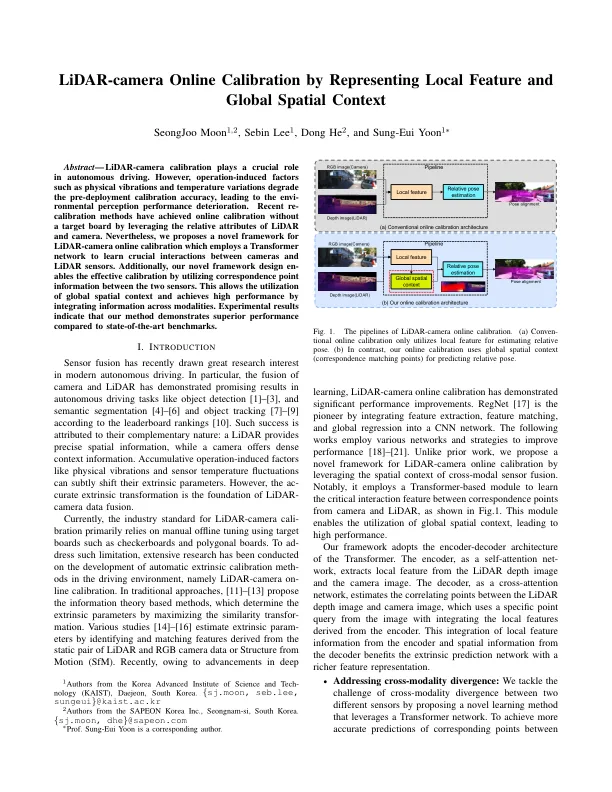
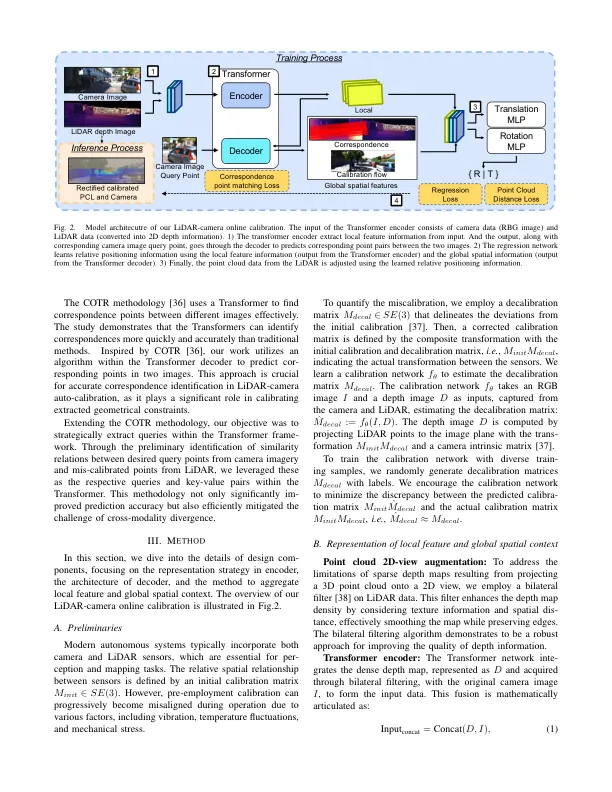
摘要 - LiDar-Camera校准在自主驾驶中起着至关重要的作用。然而,操作诱导的因素(例如物理振动和温度变化)降低了部署前校准精度,从而导致了环境感知性能恶化。最近的重新校准方法通过利用LiDAR和相机的相对属性,在没有目标板的情况下实现了在线校准。尽管如此,我们还是为LIDAR-CAMERA在线校准提供了一个新颖的框架,该框架采用了变压器网络来学习相机与激光雷达传感器之间的重要相互作用。此外,我们的新型框架设计通过利用两个传感器之间的对应点信息来促进有效的校准。这允许利用全球空间上下文,并通过整合跨模态的信息来实现高性能。实验结果表明,与最先进的基准相比,我们的方法证明了表现出色的性能。
通过表示本地功能和全局空间上下文
主要关键词


相关文件推荐