机构名称:
¥ 2.0
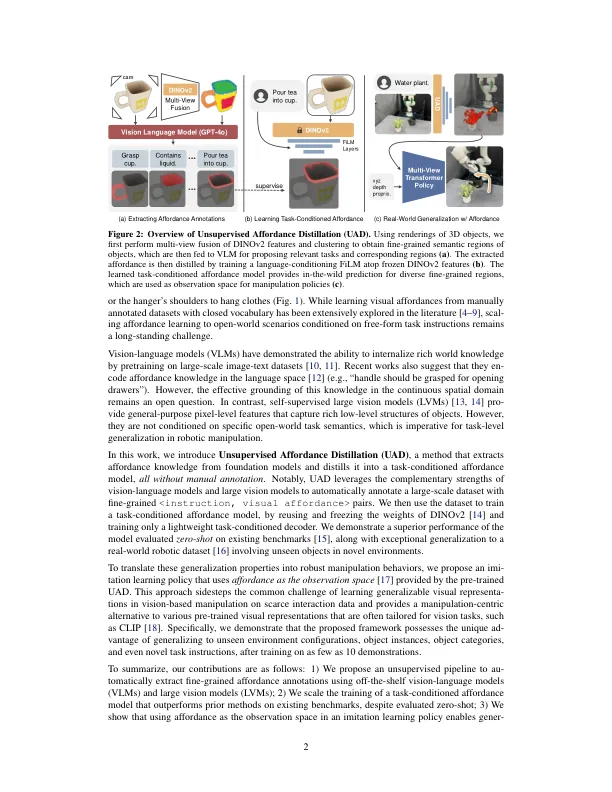
摘要:了解机器人必须在给定开放式任务中的非结构化环境中操纵对象。但是,现有的视觉负担预测方法通常仅在一组预定义的任务上手动注释的数据或条件。我们介绍了无监督的负担蒸馏(UAD),这是一种将负担知识从基础模型提炼到任务条件的辅助模型的方法,而无需任何手动注释。通过利用大型视觉模型和视觉模型的互补优势,UAD自动注释了一个具有详细的<指令,Visual Profiseance> Pairs的大规模数据集。仅在冷冻功能上训练一个轻巧的任务条件解码器,尽管仅在模拟中接受了对渲染的对象的培训,但UAD对野外机器人场景和各种人类活动表现出显着的概括。UAD提供的可负担性作为观察空间,我们展示了一项模仿学习政策,该政策证明了有希望的概括,可以看到对象实例,对象类别,甚至在培训大约10次演示后进行任务指令的变化。项目网站:https://gpt-affordance.github.io/。
UAD:机器人操纵中无监督的负担蒸馏
主要关键词



相关文件推荐