机构名称:
¥ 1.0
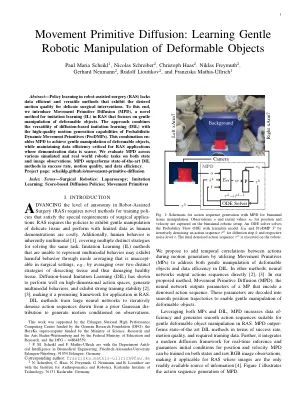
摘要 - 自主服务机器人应能够安全地与环境进行交互。但是,由于几个因素,包括感知错误,操纵失败或意外的外部事件,执行结果并不总是预期的。虽然大多数目前的研究强调检测和分类机器人失败,但我们的研究将其重点转移到了这些失败发生之前的重点。潜在的想法是,通过预测早期的潜在失败,可以采取预防措施。为了解决这个问题,我们提出了一个基于知识蒸馏的新型失败预期框架。该系统利用视频变压器,并结合了一种传感器融合网络,旨在处理RGB,深度和光流数据。我们评估方法对失败的有效性,现实世界机器人操纵数据集。实验结果表明,我们提出的框架的F1得分为82.12%,突出了其预测机器人执行失败的能力,最高可提前一秒钟。
基于知识蒸馏的机器人 - 对象操纵失效预期
主要关键词



相关文件推荐