机构名称:
¥ 1.0
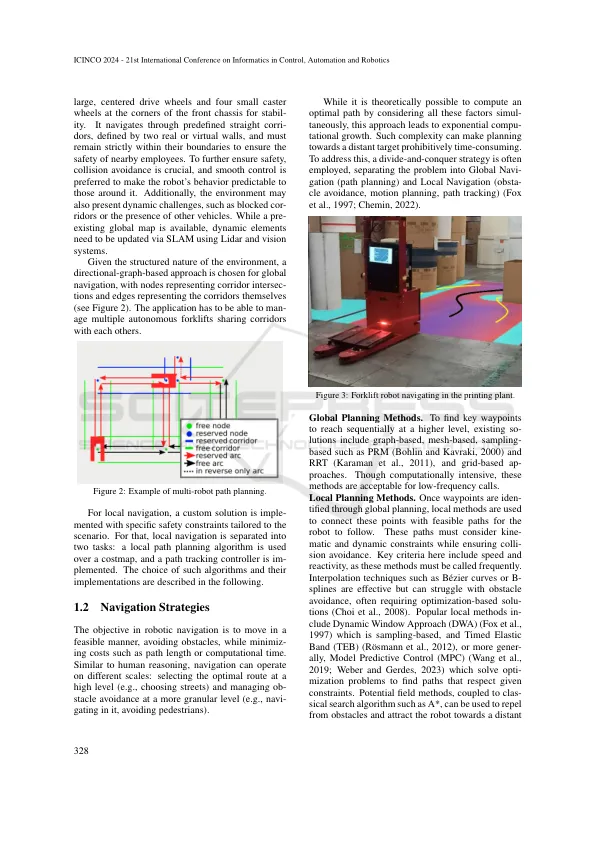
摘要:本文介绍了在打印工厂混乱且不断变化的环境中自动叉车导航应用程序的完整体系结构。根据可用导航轨道从现有的道路网络中选择全局路径。然后,一个本地路径规划仪与路径跟踪控制器相结合,可以使自主机器人导航。有限状态机器(FSM)体系结构确保在任务期间机器人的不同操作模式之间的过渡,包括避免障碍物。导航走廊是动态定义的,并通过跟踪控制约束的定义来尊重,并始终考虑安全有效的导航,并考虑到拥挤的工厂中叉车的空间约束。在ROS凉亭中模拟了一个叉车机器人及其环境,以验证该方法,然后在实际机器人原型上进行深入的实验,并在现实的操作场景中实时估算其实时性能。
自主叉车在混乱的物流工厂内导航
主要关键词




相关文件推荐