机构名称:
¥ 1.0
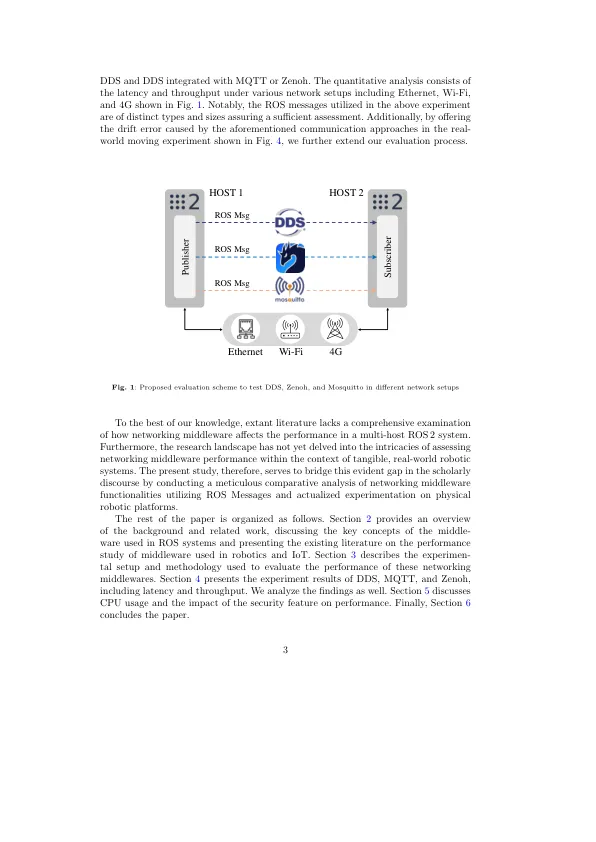
分布式系统之间涉及通信的数据传输和涉及的设备的数量增加使其具有挑战性,但要具有高效且可靠的网络中间件。在机器人技术和自主系统中,ROS 2的广泛应用带来了使用各种网络中间Wares与ROS 2中的DDS一起使用的可能性,以更好地在边缘设备之间或边缘设备和云之间进行更好的通信。但是,缺乏将这些网络中间件与ROS 2进行整合的全面沟通性能比较。在这项研究中,我们提供了用于使用多个主机系统中ROS 2中的DDS(包括MQTT和ZenoH)在内的使用网络中间Wares的通信性能的定量分析。为了进行完整可靠的比较,我们通过通过以太网,Wi-Fi和4G(包括以太网,Wi-Fi和4G)发送不同的数据和数据来计算这些中间Wares的潜伏期和吞吐量。将评估扩展到现实世界的应用程序方案,我们评估了这些网络中间Wares引起的漂移误差(位置变化),机器人以相同的方形路径移动。我们的结果表明,在以太网下,Cyclonedds的性能较好,而在Wi-Fi和4g下表现更好。在实际的机器人测试中,通过Zenoh随时间时间(96 s)的机器人移动轨迹漂移误差是最小的。值得注意的是,我们对这些网络中间Wares的CPU利用率以及通过在本文末尾在ROS 2中启用安全功能造成的性能影响进行了讨论。
比较边缘到...
主要关键词



相关文件推荐