机构名称:
¥ 1.0
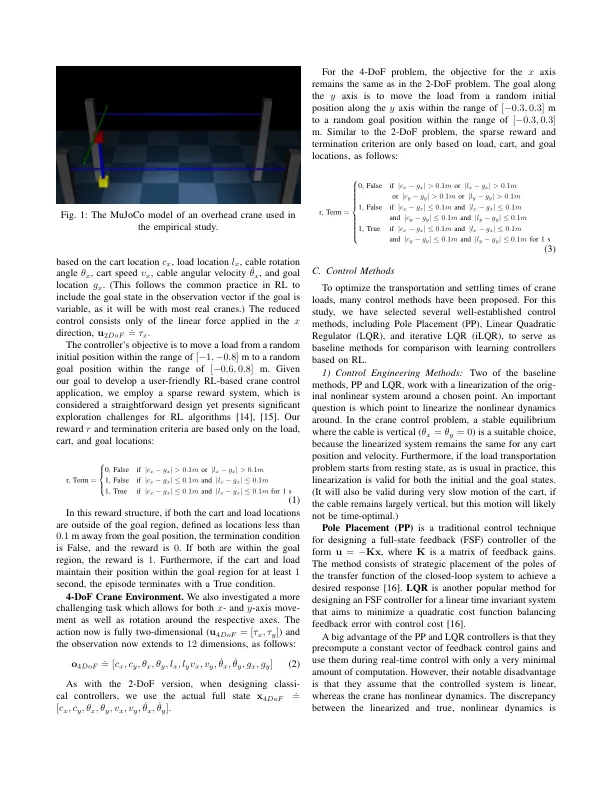
起重机是建筑,材料处理,仓储和供应链运营的必不可少的一部分,其安全,快速的运营具有很高的经济意义。为了优化其使用,通常需要短的运输和安定时间。这两个目标通常相互矛盾,因为起重机移动的速度越快,其负载越倾向于摆动,延迟了沉降和负载的生产力使用。希望以一种快速移动负载的方式来控制起重机的方法,同时还可以抵消负载的摇摆。使这个问题变得困难的是,实际上所有类型的起重机都不足,也就是说,它们的执行器少于自由度(DOF)。一种常见的起重机是图中所示的开销(龙门)起重机1。它具有两个线性阶段垂直于彼此的线性阶段,并由电动机驱动,另一个用于在电缆上垂直悬挂负载的电动机。与可用的三个执行器相反,负载具有六个自由度,使其可以在起重机工作区内采用任何位置和方向。是什么使这种起重机将负载运输到所需位置的原因是,起重机的动力学是稳定的,并且在没有控制努力的情况下,负载最终将沉降到其悬挂下方的手推车手推车下方的位置。因此,一种简单的控制方法包括将手推车带到负载的所需(x,y)坐标,并让重力稳定载荷。此方法通常在实践中使用,但远非最佳,出于上述原因 -
学习龙门起重机的时间最佳控制
主要关键词




相关文件推荐