机构名称:
¥ 1.0
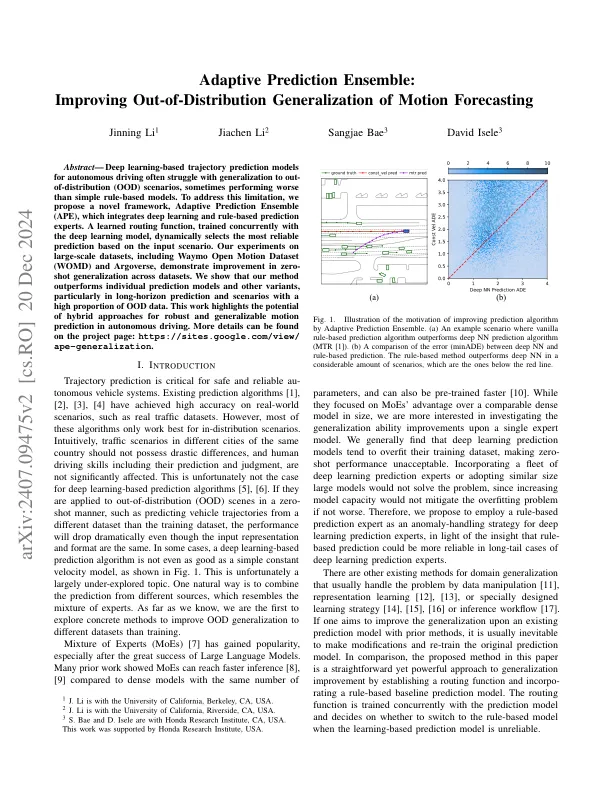
摘要 - 自主驾驶的基于深度学习的轨迹预测模型通常会在概括到分布(OOD)方案的概括中遇到困难,有时表现比简单的基于规则的模型差。为了解决这一限制,我们提出了一个新颖的框架,自适应预测集合(APE),该集合整合了深度学习和基于规则的预测专家。学习的路由功能,与深度学习模型同时训练,根据输入方案动态选择最可靠的预测。我们在大规模数据集上进行的实验,包括Waymo Open Motion Datat(WOMD)和Argoverse,证明了整个数据集的零射击概括的改进。我们表明,我们的方法的表现优于单个预测模型和其他变体,尤其是在具有很高比例的OOD数据的长音预测和场景中。这项工作强调了混合方法在自主驾驶中进行鲁棒和可推广的运动预测的潜力。更多详细信息可以在项目页面上找到:https://sites.google.com/view/ ape-generalization。
自适应预测合奏:改善运动预测的分布概括
主要关键词




相关文件推荐