机构名称:
¥ 1.0
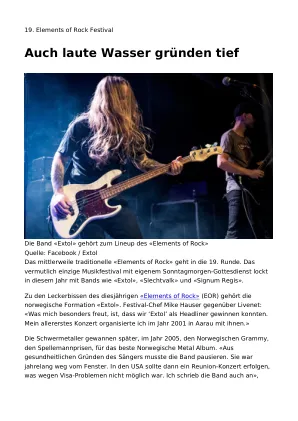
为了自主驾驶模拟,早期尝试[8,32,35]部署游戏引擎来渲染图像。它不仅需要耗时的过程来重建虚拟场景,而且还需要以低现实主义的形式产生结果。,用于新型视图Synthesis(NVS)的神经渲染技术,例如神经辐射场(NERF)[21]和3D高斯分裂(3DGS)[14],用于同步,以使照片现实主义的街道视图进行同步。当前的研究[4、10、20、23、28、39、43、47、48、51、59]主要是街道视图合成中面临的两个挑战:无界场景的重建和染色体对象的建模。尽管已经取得了令人兴奋的进度,但在现有作品中尚未很好地探索评估重建质量的关键问题。众所周知,理想的场景仿真系统应具有高质量的自由视线渲染的能力。目前的作品通常采用从vehicle捕获而在训练阶段却看不见的观点(例如图。1),同时忽略了偏离训练观点的小说观点(例如图。1)。处理这些新颖的观点时,呈现质量的降低明显降低,对现有作品的模糊和伪像,如图1。此问题归因于车辆收集的图像的固有约束视图。训练图像通常沿着车辆的行驶方向捕获,并以车辆的车道为中心。由于车辆的快速行驶速度,框架之间的超偏度有限,因此不允许对现场中的物体进行全面的多视觉观察。因此,可以从稀疏视图中将自动驾驶的街道视图综合任务理解为重建问题。
sgd:街道视图综合与高斯裂纹和扩散先验
主要关键词




相关文件推荐