机构名称:
¥ 1.0
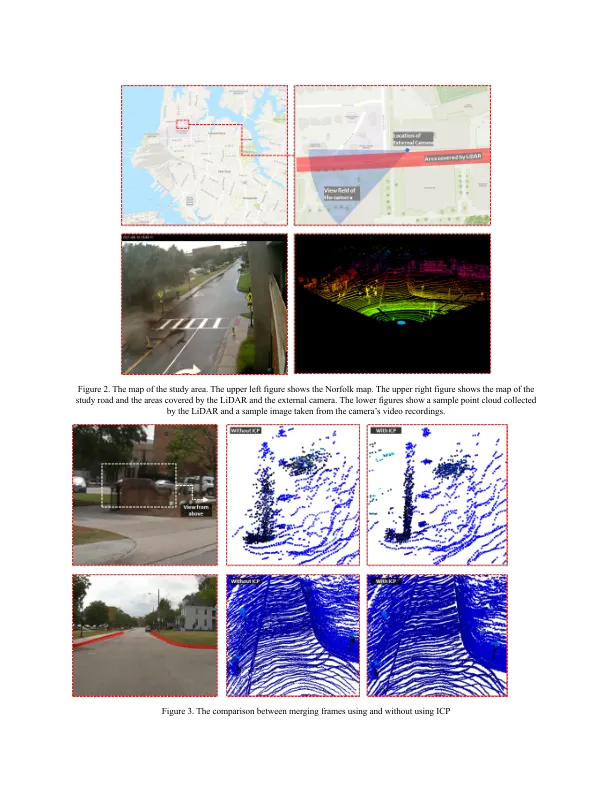
摘要在这项研究中,我们从安装在车辆上的3D激光雷达和外部交通监视摄像头的图像中融合数据,以创建经常洪水泛滥的道路部分的3D表示。这项研究中的LIDAR的点云数据是从ODU校园附近Norfolk的W 49街的一条路段收集的。交通监视摄像头安装在同一地区的公共停车大楼上。LIDAR在车辆穿越该部分时会收集连续的点云框架。使用ICP注册方法将与外部摄像头监控的多个与各个道路相关的LIDAR框架首先合并为单位点云,代表路段的局部高分辨率数字高程模型(DEM)。然后,将结果的DEM投射到监视摄像头捕获的被淹没的道路的图像上。到此目的,采用了摄像机校准技术来估计转换参数。相机校准方法依赖于一个包含点及其相应像素的数据集中的目标图像。生成了点的虚拟网格和相应的像素以运行相机校准函数。提到的数据集是借助激光雷达的内部相机上的投射点云而生成的,从而使我们能够识别对象和Curbsides。还采用了观点几何原则来创建DEM。投影结果显示了用于摄像机校准的技术技术的成功性能。深度估计是在外部相机记录的洪水图像上使用投影的DEM模型进行的。
使用LIDAR和监视摄像机的数据估算道路洪水的深度
主要关键词



相关文件推荐