机构名称:
¥ 1.0
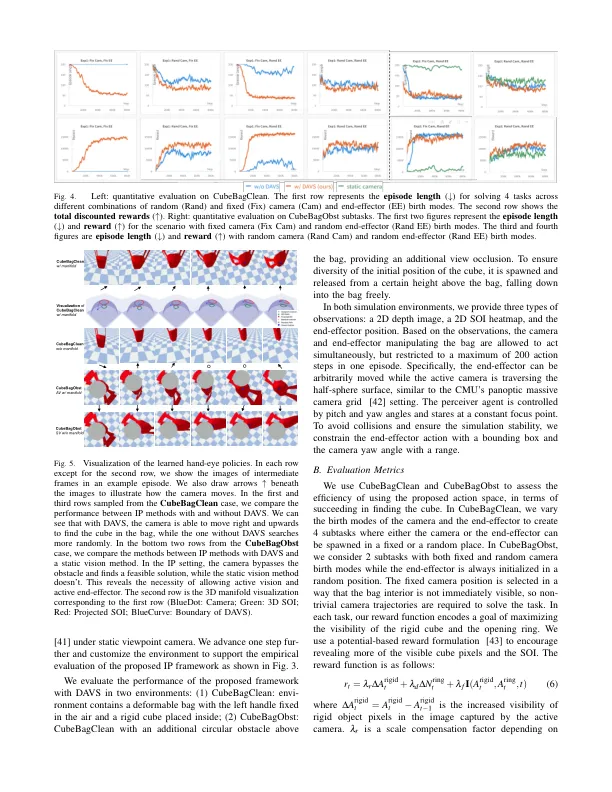
摘要 - 互动感知使机器人能够操纵环境和对象将它们带入有利于感知过程的状态。可变形物体在基于视觉的感知中的严重操纵难度和遮挡,对此构成挑战。在这项工作中,我们通过涉及活动相机和对象操纵器的设置解决了这样的问题。我们的方法基于一个顺序的决策框架,并明确考虑了耦合相机和操纵器的运动规律性和结构。我们为构建和计算一个称为动态活动视觉空间(DAVS)的子空间的方法有效地利用了运动探索中的规律性。在模拟和真实的双臂机器人设置中都验证了框架和方法的有效性。我们的结果证实了可变形对象的交互感中的主动摄像头和协调运动的必要性。
可变形对象操纵的互动感知
主要关键词




相关文件推荐