机构名称:
¥ 1.0
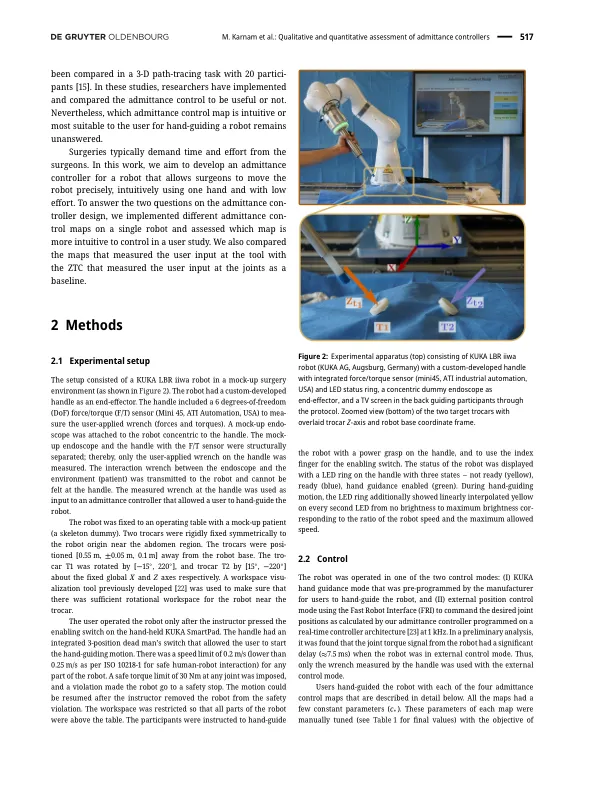
许多手术任务需要总刀具运动,其中工具的移动和定位在宏观尺度(约1厘米)的精度上;例如,将工具插入套筒,交换工具,清洁工具。也存在主要需要这种宏观动作的程序,例如,将安装在机器人上的超声扫描仪移动[1]和牙齿辅助[2]。传统的手术机器人,例如DA Vinci手术系统(Intuitive Surgical,USA),不可用的背态被动被动机制作为工具持有人,并允许外科医生将工具固定。这样的被动机器人可以限制外科医生使其简单而准确的总工具移动的能力,尤其是对于沉重而笨重的工具。作为替代方案,更新的特定和通用宏机器人使用主动的串行机器人和控制器,使外科医生可以手工指导工具。例如,Mako Robot-Arms(美国Stryker)进行膝盖手术,允许手动引导并限制外科医生沿预先计划的手术路径的运动,以确保安全性和准确性。除了这种干预特定的机器人之外,市场上还有通用医学宏观机器人,可以安全的物理人类机器人互动(PHRI),例如,Kuka LBR IIWA Med(Kuka ag ag,kuka ag,德国奥格斯堡,德国)。可以在此类机器人上安装不同的工具;例如,在Laserosteothome [3]中,使用超声扫描[1]和放射治疗[4]。但是,其他针对PHRI安全的宏机器人也用于外科应用研究中;例如,熊猫(德国弗兰卡·埃米卡(Franka Emika))进行牙科辅助[2]和中耳手术[5]或UR 5(UR 5(UNI-VERSAL ROBOTS,丹麦))进行针插入[6]。
对手工引导手术机器人的入学控制器的定性和定量评估
主要关键词

相关文件推荐