
机构名称:
¥ 1.0
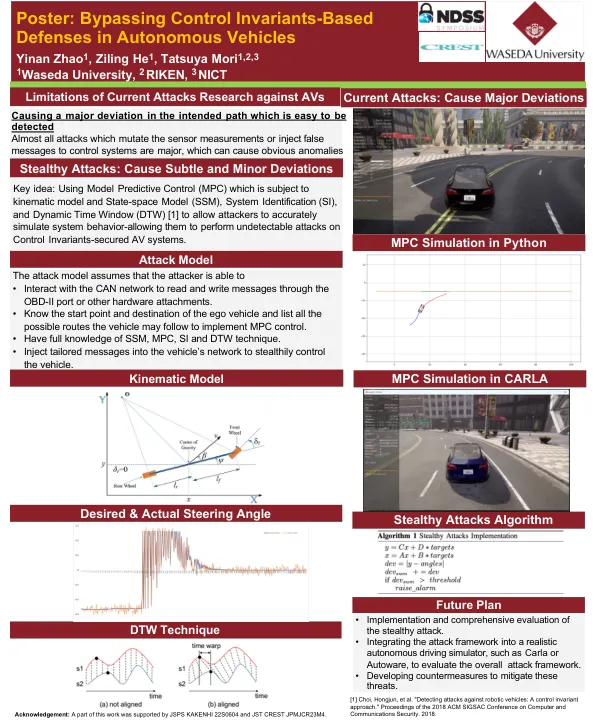
摘要 - 自治车辆(AV)越来越受到黑客的攻击。但是,AVS的系统安全至关重要,因为任何成功的攻击都会导致严重的经济损失,设备损失甚至人类生命的损失。评估新算法的良好安全原则是表明该提案对强大的对手有抵抗力。因此,在这张海报中,我们意识到最糟糕的攻击类型,称为隐形攻击,对转向控制系统,这对于AVS的横向控制很重要。我们提出的隐形攻击的核心是使用模型预测性控制(MPC),状态空间模型(SSM),系统识别(SI)和动态时间扭曲(DTW)允许攻击者准确模拟系统行为,从而允许它们执行不可检测的攻击。
海报:绕过自动驾驶汽车中的基于控制不变的防御
主要关键词

相关文件推荐





























