机构名称:
¥ 1.0
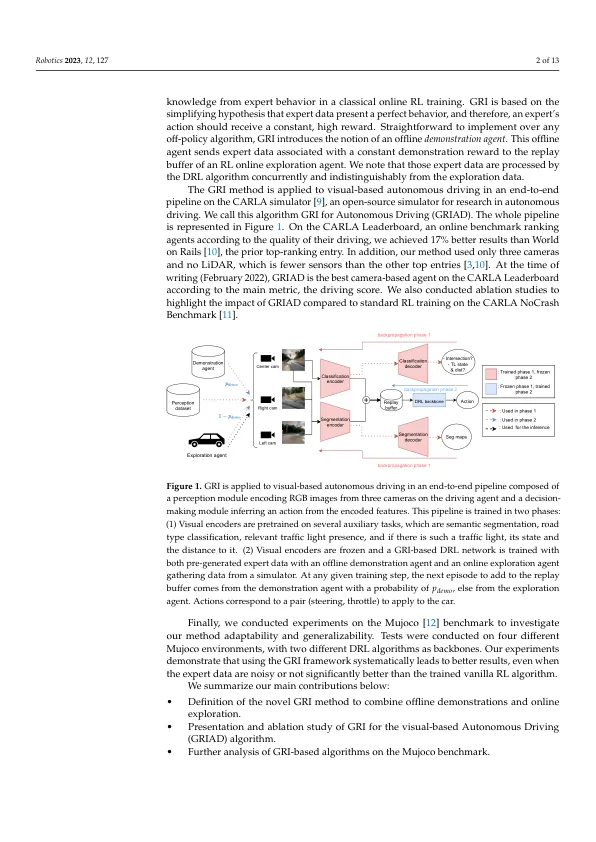
摘要:深入强化学习(DRL)已被证明对几种复杂的决策应用有效,例如自主驾驶和机器人技术。但是,众所周知,DRL受到其高样本复杂性和缺乏稳定性的限制。先验知识,例如,作为专家演示,通常可以使用,但要挑战以减轻这些问题。在本文中,我们提出了一般增强模仿(GRI),这是一种新颖的方法,结合了探索和专家数据的好处,并且可以直接实施任何非政策RL算法。我们做出了一个简化的假设:可以将专家演示视为完美的数据,其基础政策将获得不断的高奖励。基于此假设,GRI介绍了示范剂的概念。该代理发送专家数据,这些数据是与在线RL勘探代理所带来的经验同时且无法区分的。我们表明,我们的方法可以对城市环境中基于摄像机的自动驾驶进行重大改进。我们在使用不同的非政策RL算法的穆约科克连续控制任务上进一步验证了GRI方法。我们的方法在Carla排行榜上排名第一个,在先前的最新方法中,在Rails上胜过17%。
gri:一般增强模仿及其在基于视觉的自动驾驶中的应用
主要关键词


相关文件推荐