机构名称:
¥ 1.0
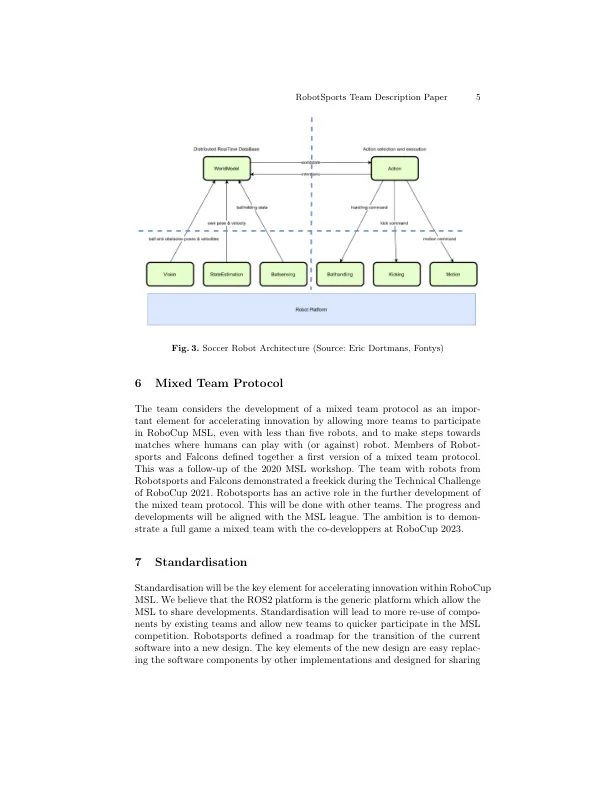
机器人控制托管在Aaeon 8251AI系统上。8251AI以极度紧凑的形式为边缘带来了高性能的AI功能。此外,该单元具有很小的质量,具有出色的IO设施,并且功耗低(15W,6核功率模式)。在8251AI上,我们正在运行Ubuntu 20.04 64位OS与自定义控制软件结合使用。驱动器和球形车轮的运动控制任务托管在三个双轴机器人运动控制器上[3],这些运动控制器由Teensy 4.0微控制器协调[4]。与主PC接口是通过LAN ETHERNET总线进行的。一般I/O控制集中在客户委员会上,基于微控制器,其中包括(主)功率控制和安全电路的PLC功能。在演示和实验期间,与机器人的安全控制器连接了900 MHz RF Mod-ule,以提供远程杀戮开关功能。我们有一个电磁踢机制。自动螺线管用于致动杆。可以选择将踢球的两个“脚”之一。一只脚在地板上踢低,另一只脚踢出一杆。已经开发了一个新的充电电路来充电电容器堆栈。通过新颖的基于IGBT的开关进行排放,该开关可以进行脉冲调制以控制射击功率和 - 持续性。控制在通过LAN以太网接口到Aaeon 8251AI的微控制器上实现。
Robotsports团队描述纸
主要关键词




相关文件推荐