机构名称:
¥ 1.0
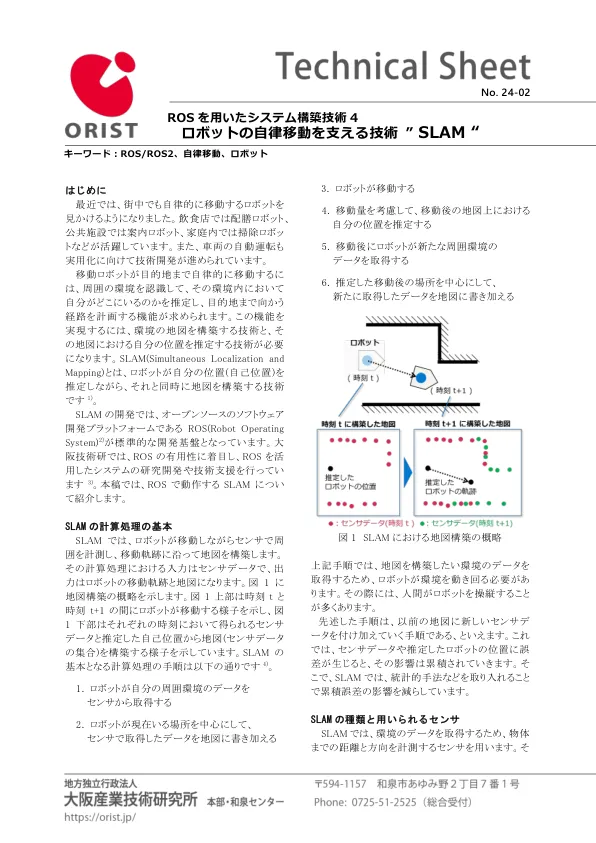
图1在上述过程中,MAP构造的概述,机器人需要在环境中移动以获取要构建地图的环境的数据。在这种情况下,人类经常驾驶机器人。可以说上述过程是将新的传感器数据添加到上一个地图中的过程。在这种情况下,如果传感器数据或机器人的估计位置发生错误,则会累积效果。因此,SLAM通过合并统计方法和其他方法来降低累积错误的影响。使用的大满贯和传感器的类型
使用ROS 4支持机器人自主运动的系统建设技术...
主要关键词

相关文件推荐