机构名称:
¥ 1.0
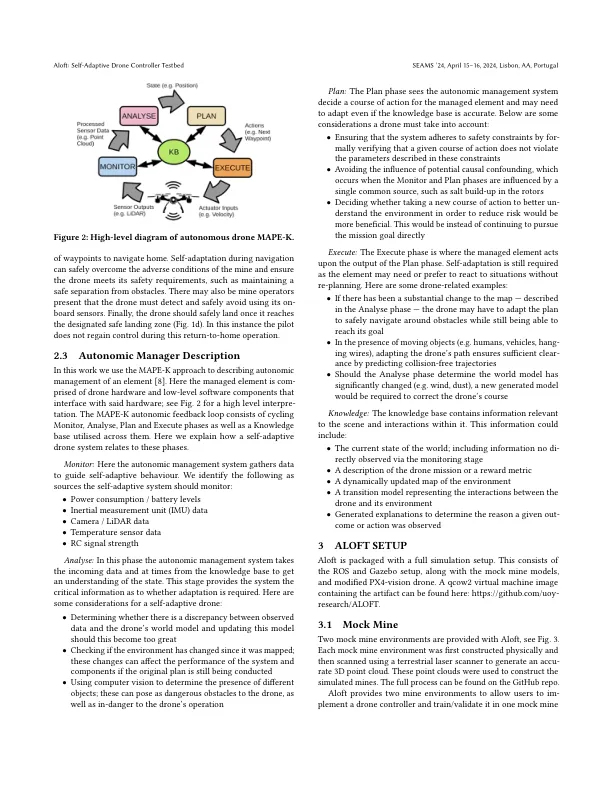
空中无人机越来越被视为在安全关键环境中检查的宝贵工具。在采矿行动中,这对人类运营商带来了动态和危险的环境,这一点都没有。无人机可以在许多情况下部署,包括有效的测量以及搜救任务。在这些动态上下文中运行是在挑战,因此需要无人机控制软件在运行时检测和适应条件。为了帮助开发这样的系统,我们向我们提出的系统是一个模拟测试床,用于调查矿山中无人机的自适应控制器。Aloft使用凉亭利用机器人操作系统(ROS)和模型环境来提供基于物理的测试。仿真环境是由在矿山的物理模型中收集的3D点云构造的,并包含在现实世界中预期的特征。高举允许研究社区的成员将自己的自适应控制器部署到无人机的控制循环中
高空:自适应无人机控制器测试床
主要关键词


相关文件推荐