机构名称:
¥ 1.0
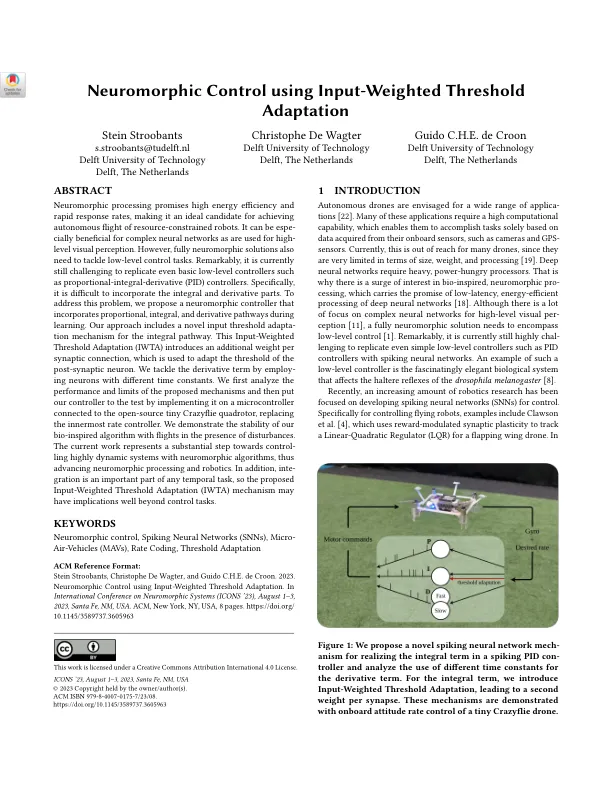
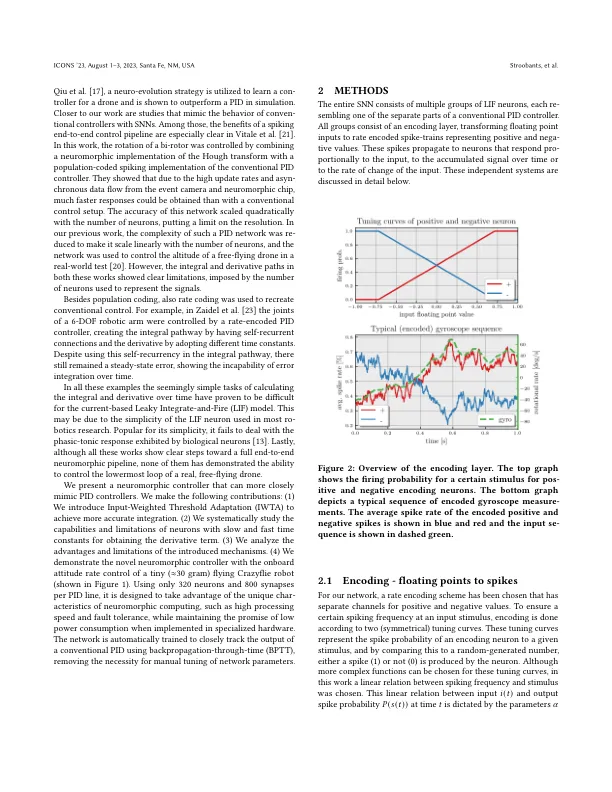
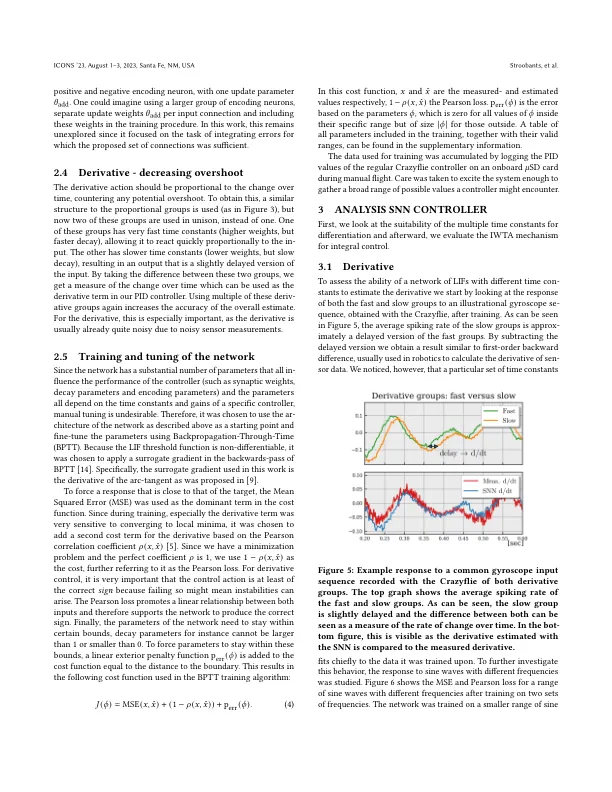
神经形态处理有望高能效率和快速响应率,使其成为实现自动驾驶资源受限机器人的理想候选者。对于高水平的视觉感知而言,它可能对复杂的神经网络有益。但是,完全神经形态的解决方案还需要解决低级控制任务。值得注意的是,目前仍然具有挑战性,即使是基本的低级控制器,例如比例综合衍生(PID)控制器。具体来说,很难合并整体和衍生部分。为了解决这个问题,我们提出了一个神经形态控制器,该神经形态控制器在学习过程中结合了比例,积分和衍生途径。我们的方法包括整体途径的新型输入阈值适应机制。此输入加权阈值适应(IWTA)引入了每个突触连接的额外重量,用于适应后突触后神经元的阈值。我们通过使用不同时间常数使用神经元来解决衍生术语。我们首先分析了提出的机制的性能和限制,然后通过将其在连接到开源的小型Crazyflie四极管上的微控制器上实现,将其控制在测试中,以取代内部的速率控制器。我们证明了在存在干扰的情况下飞行的生物启发算法的稳定性。当前的工作代表了用神经形态算法控制高度动态系统的实质性一步,从而推进了神经形态处理和机器人技术。此外,整体是任何时间任务的重要组成部分,因此提出的输入加权阈值适应(IWTA)机制可能具有超出控制任务的影响。
使用输入加权阈值适应的神经形态控制
主要关键词

相关文件推荐