机构名称:
¥ 1.0
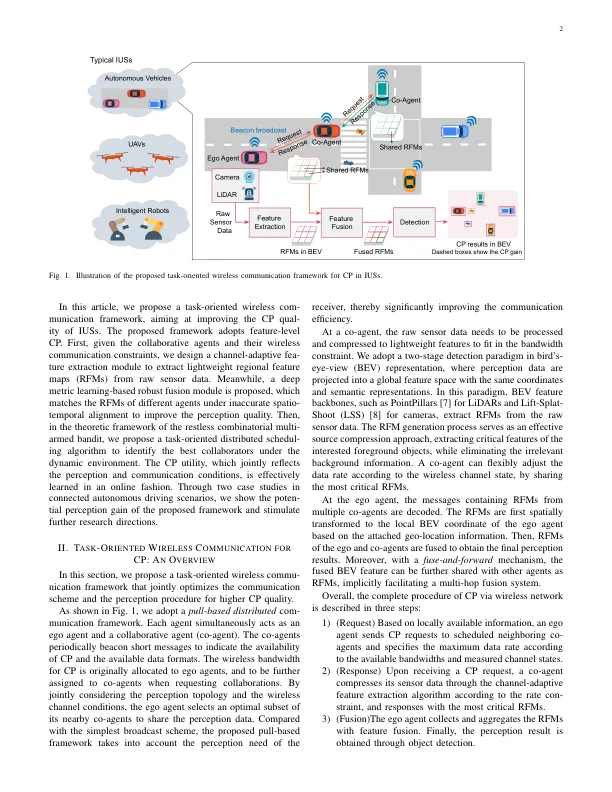
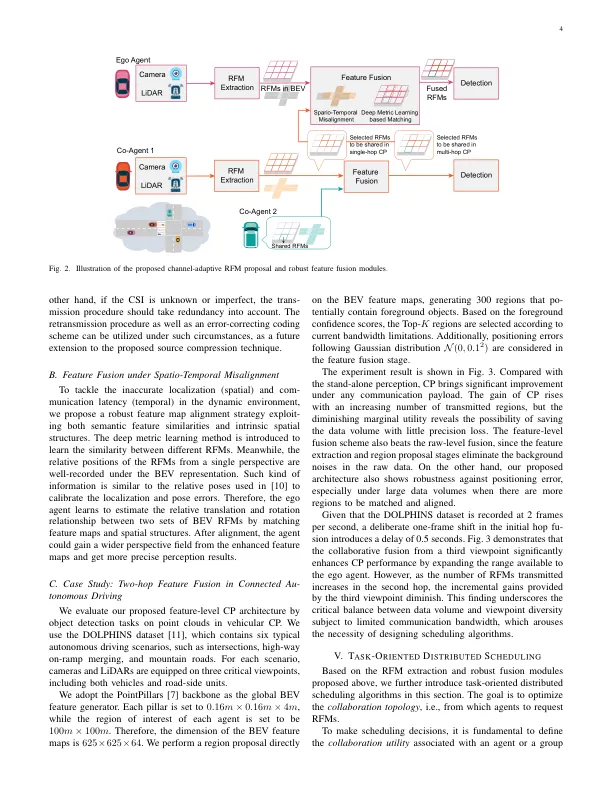
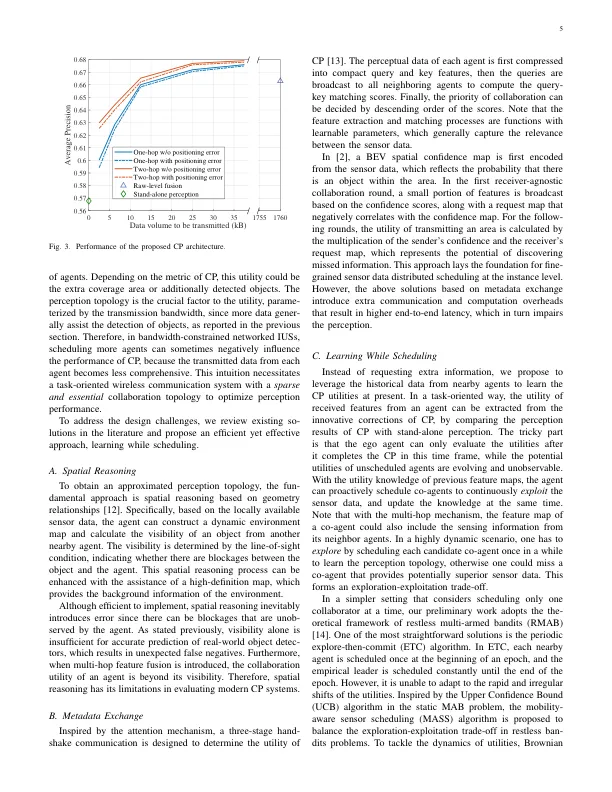
摘要 - 集中感知(CP)表明,在智能无人系统(IUSS)中实现了更全面和可靠的环境实现。然而,由于CP任务的特征和无线通道的动态,CP的实施仍然面临着关键的挑战。在本文中,提出了一个面向任务的无线通信框架,以共同优化通信方案和CP程序。我们首先提出了渠道自适应压缩和鲁棒融合方法,以在无线通信约束下提取和利用最有价值的语义信息。然后,我们提出了一种面向任务的分布式调度算法,以确定在动态环境下的CP的最佳合作者。主要思想是在安排时学习,其中协作实用程序可以通过低计算和沟通开销有效地学习。在连接的自主驾驶场景中进行案例研究以验证拟议的框架。最后,我们确定了几个未来的研究方向。
以任务为导向的无线通信,用于智能无人系统中的协作感知
主要关键词

相关文件推荐