机构名称:
¥ 1.0
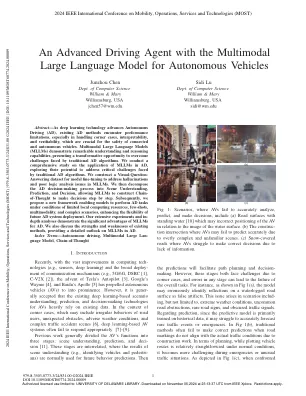
准确地对重型车辆(例如卡车)的动态进行建模对于安全自动导航至关重要。动态模型需要在各种天气和道路状况以及不同的负载配置下捕获复杂的系统行为。此摘要概述了在自动驾驶汽车的运动计划和控制背景下,物理知识的长期记忆(PI-LSTM)网络的整合为动态模型。通过利用LSTM的预测能力来建模复杂的动力学,并通过在损失函数中添加物理约束而施加的普遍性,我们为生成针对运动计划和控制而定制的更有效和可靠的预测的框架。车辆建模的系统识别问题旨在解决以下普通微分方程:
使用具有物理信息的LSTM进行自动驾驶汽车建模
主要关键词


相关文件推荐