机构名称:
¥ 1.0
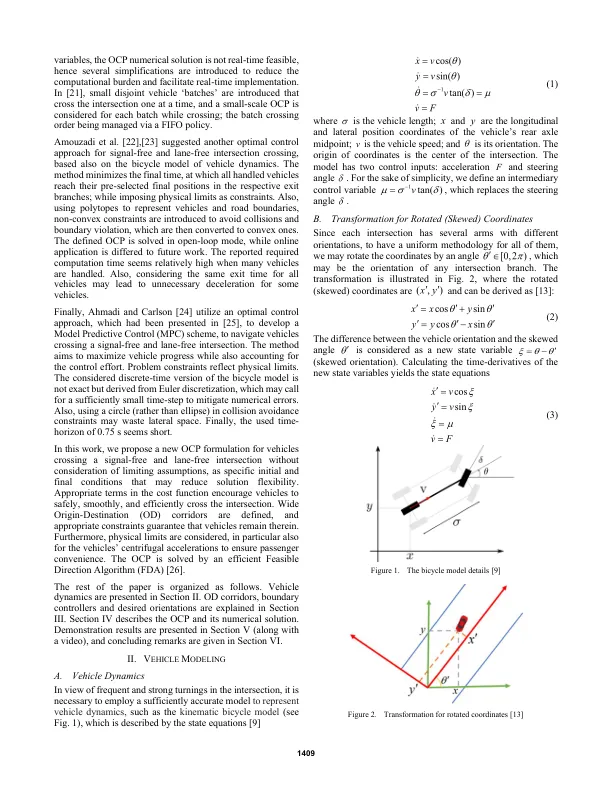
摘要 - 开发无信号的交叉点,其中所有OD(原始目的地)运动的连接自动化车辆(CAVS)被适当地指导以同时交叉,可能会大大改善吞吐量并减少燃油消耗。自然,交叉区域的车辆与车道无关。因此,可以将过境区域视为无车道基础设施以进一步改善开发是合理的。本文提出了一种越过无信号和无车道交叉路口的骑士的联合最佳控制方法。具体来说,所有车辆的控制输入(包括加速度和转向角度)通过基于车辆动力学的自行车模型解决单个最佳控制问题(OCP),在时间胜地上优化了加速和转向角度。成本功能包括适当的条款,以确保平稳且无冲动的运动,同时还要考虑燃油消耗和所需的速度跟踪。适当的约束旨在尊重交叉点边界,并确保车辆向各自目的地的平稳运动。定义的OCP通过有效的可行方向算法(FDA)进行数值求解,该算法可以接受。一个具有挑战性的演示示例证实了建议方法的有效性。
对越过无车道的无信号交叉的自动化车辆的最佳控制
主要关键词


相关文件推荐