机构名称:
¥ 1.0
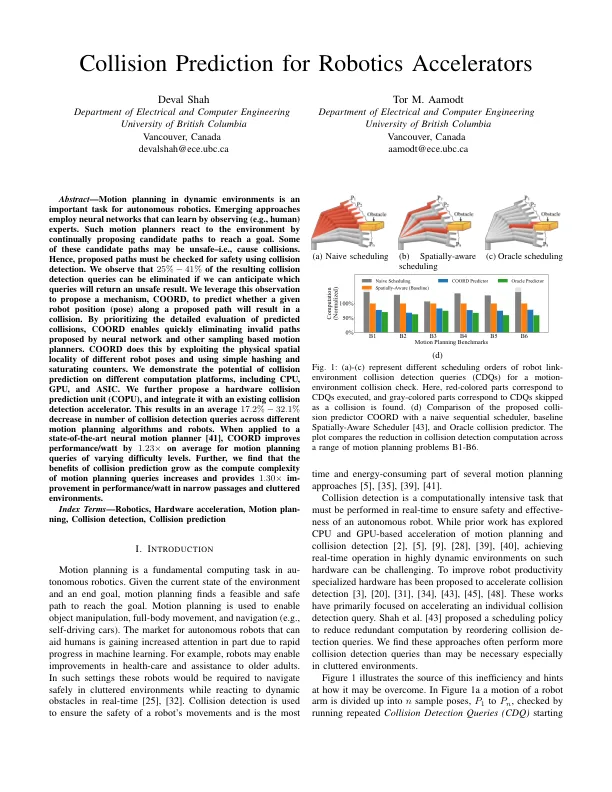
摘要 - 动态环境中的动作计划是自动机器人技术的重要任务。新兴方法采用可以通过观察(例如人类)专家来学习的神经网络。此类运动计划者通过不断提出候选路径以实现目标来对环境做出反应。这些候选路径中的一些可能是不安全的,即导致碰撞。因此,必须使用碰撞检测检查提议的路径以确保安全。我们观察到,如果我们可以预期哪些查询将返回不安全的结果,则可以消除25% - 41%的碰撞检测查询。我们利用这一观察结果提出了一种机制坐标,以预测沿拟议路径的给定机器人位置(姿势)是否会导致碰撞。通过优先考虑对预测碰撞的详细评估,坐标可以快速消除神经网络和其他基于采样的运动计划者提出的无效路径。坐标通过利用不同机器人姿势的物理空间位置并使用简单的哈希和饱和计数器来实现这一目标。我们证明了在包括CPU,GPU和ASIC在内的不同计算平台上碰撞预测的潜力。我们进一步提出了一个硬件碰撞预测单元(COPU),并将其与现有的碰撞检测加速器集成在一起。这平均17。2% - 32。跨不同运动计划算法和机器人的碰撞检测查询数量减少了1%。当应用于最先进的神经运动计划者[41]时,坐标会提高性能/瓦特1。平均而言,针对不同难度水平的运动计划查询。此外,我们发现碰撞预测的好处随着运动计划查询的计算复杂性增加并提供1。30×在狭窄的段落和混乱的环境中进行性能/瓦特的迹象。索引术语 - 机器人,硬件加速度,运动计划,碰撞检测,碰撞预测
机器人加速器的碰撞预测
主要关键词

相关文件推荐