机构名称:
¥ 1.0
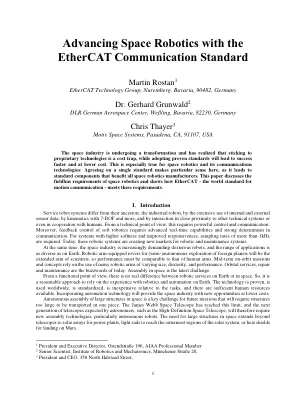
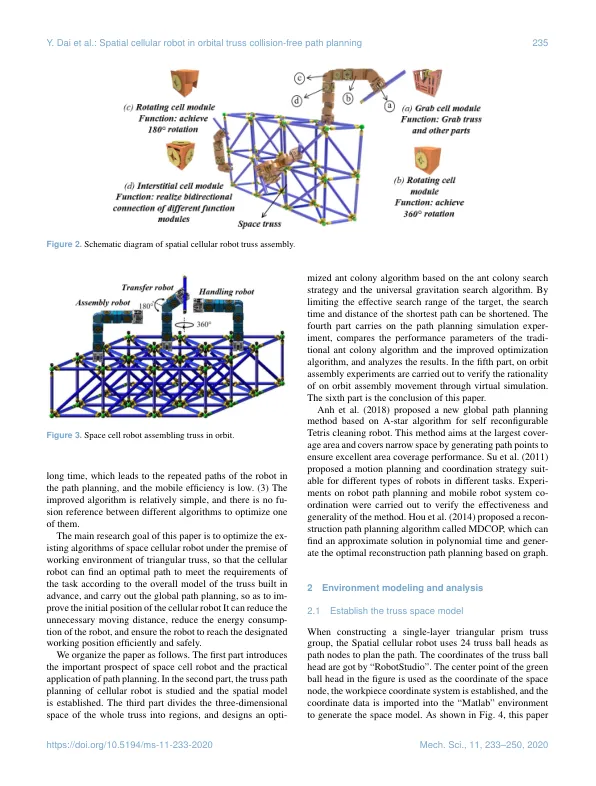
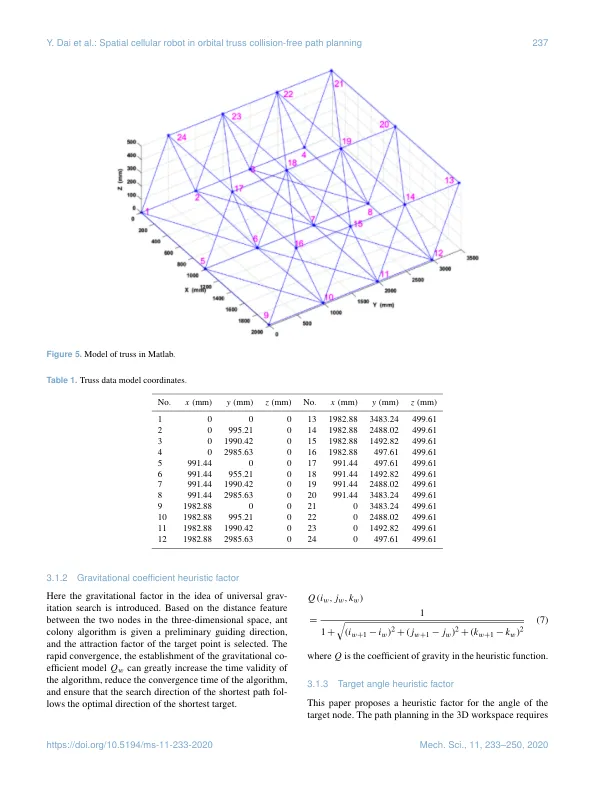
摘要:针对空间站桁架上元胞机器人的移动路径规划问题,以三棱柱桁架为研究对象,提出一种融入引力搜索算法的优化蚁群算法。创新性地采用了限制探索区域的分层搜索策略,利用引力搜索算法求得桁架节点的最优解,并进一步将其转化为蚁群算法中信息素的初值,可以有效防止算法在前期陷入局部最优解,使得优化算法具有更快的收敛速度。本文提出了一种包含目标间夹角的启发式函数,可以有效避免前期的盲目搜索,提高路径搜索能力。仿真结果表明,在选择桁架路径时可以有效减少元胞机器人的路径和规划时间。
空间蜂窝机器人轨道桁架无碰撞路径规划
主要关键词



相关文件推荐