机构名称:
¥ 1.0
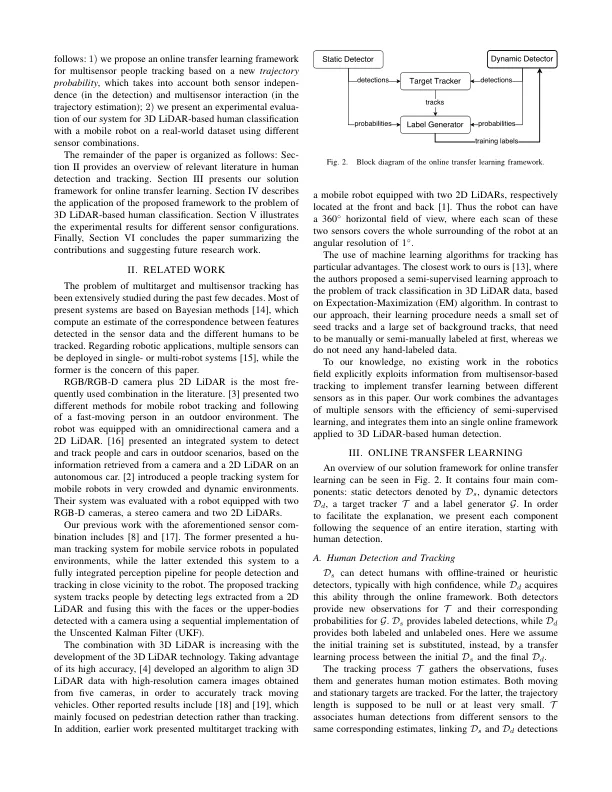
摘要 — 人体检测和跟踪是服务机器人的一项基本任务,其中多种传感器的组合使用具有尚未充分利用的潜在优势。在本文中,我们介绍了一个框架,允许机器人利用多传感器跟踪系统,随着时间的推移从其他传感器学习新的基于 3D LiDAR 的人体分类器。主要创新是使用现有传感器的不同检测器(即 RGB-D 摄像头、2D LiDAR)基于新的“轨迹概率”在线训练新的基于 3D LiDAR 的人体分类器。我们的框架使用这个概率来检查新的检测是否属于由不同传感器和/或检测器估计的人体轨迹,并以半监督的方式学习人体分类器。该框架已经在移动机器人收集的真实世界数据集上实施和测试。我们通过实验表明,我们的系统能够有效地从不同的传感器和环境中学习,并且基于 3D LiDAR 的人体分类性能随着所使用的传感器/探测器数量的增加而提高。
基于 3D LiDAR 的多传感器在线迁移学习...
主要关键词




相关文件推荐