机构名称:
¥ 1.0
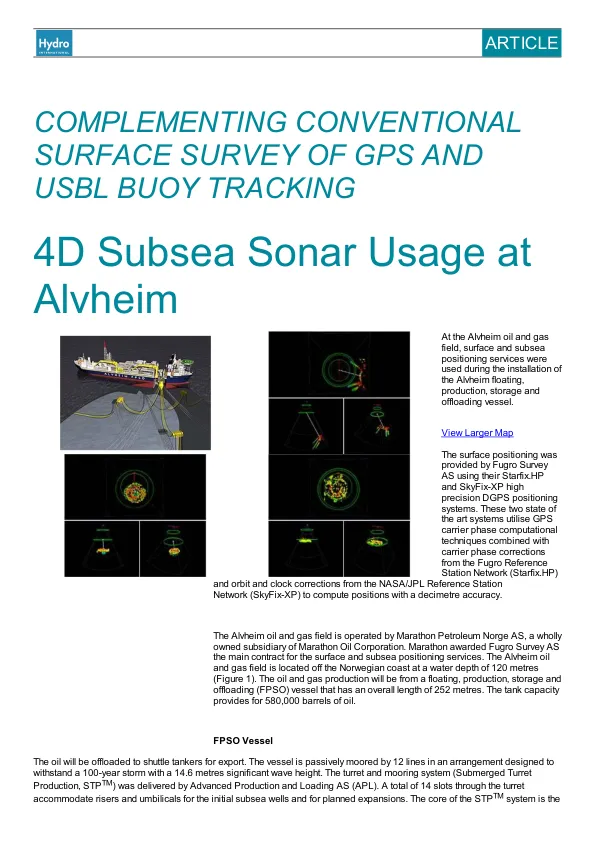
在现场安装期间,必须将转塔拉入配合锥体。船只通过四艘拖船进行动态定位,并使用拖船管理系统。拉入由安装在 Alvheim 船上的绞盘执行,绳索穿过浮标。当船只因波浪和拖船定位等而移动时,重要的是实时监控转塔顶部以决定何时可以拉入。在规划阶段,人们对如此靠近 FPSO 船体的超短基线 (USBL) 跟踪系统的稳健性表示担忧。对 USBL 系统性能的担忧是由于浮标顶部 (±6m) 与船只船体非常接近。这可能导致船体反射产生杂散信号。此外,USBL 收发器位于 FPSO 附近的遥控机器人 (ROV) 上。因此,我们决定研究其他方法,以定位浮标顶部相对于配合锥体的位置,以防 USBL 不准确或 ROV 与 FPSO 上的定位团队之间的链接失败。图 2 显示了 Alvheim FPSO 和浮标,其转塔位于配合锥体内。
阿尔夫海姆的 4D 海底声纳使用
主要关键词

相关文件推荐