
机构名称:
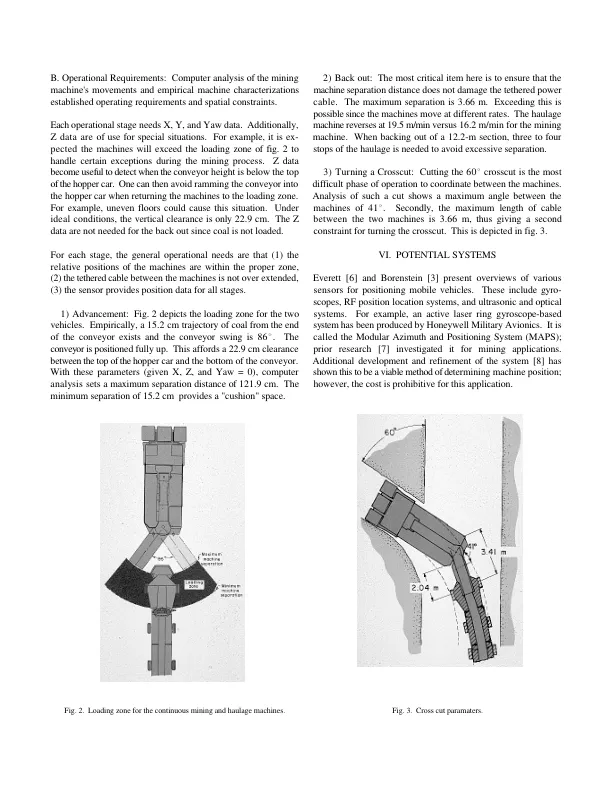
¥ 1.0
在开采和运输煤炭的过程中,操作员在狭窄的矿井内可能会被移动机械撞击或抓到。解决此问题的方法是使用运输设备上的导航系统,使其跟随开采煤炭的机器。这实际上涉及基于传感器的机器对接。能够承受恶劣的矿井环境(包括灰尘、甲烷气体和水)的传感器起着关键作用。对采矿机的运动和经验机器特性进行计算机分析,以确定操作要求和空间限制,以确保将煤炭正确装入运输设备。这些数据用于选择传感系统。扫描激光系统和超声波传感器等各种技术经常用于其他应用,但被发现不可接受。然而,采用主动目标的近红外 (IR) 传感器满足要求。该传感器具有标称 75 EE 锥形视场和 0.1 至 18.0 m 的范围。对于单目标模式,在 3.56 米的距离处,标称范围精度为 4.3%。生成了校正算法,将误差降低至 0.6%。空气中的灰尘测试表明,在超过联邦法律允许的浓度(7.5 倍)的水平下,精度(最坏情况)下降不到 0.8%。该传感器可以跟踪多个活动目标,提供五个自由度 (DOF) 测量。使用四个目标,标称范围精度为 0.4%,无需校正算法。III. 当前操作场景 拖运系统跟随采矿机的制导系统在商业上不存在。这样的系统可以减少当前拖运采矿设备造成的死亡和伤害,并且是当前拖运控制的可行替代方案。
矿井连续运输导航传感器
主要关键词



相关文件推荐






















