XiaoMi-AI文件搜索系统
World File Search SystemiD
valoctocogene roxaparvovec-rvox(Roctavian)策略ID
EFFECTIVE DATE: 01/01/2024 PRODUCT(S): STAR, STAR Plus, STAR Kids, STAR Health, CHIP, CHIP Perinate REVIEWED/REVISED DATE: REGULATOR MOST RECENT APPROVAL DATE(S): N/A POLICY STATEMENT: The purpose of this Clinical Policy is to provide a guide to medical necessity reviews for valoctocogene roxaparvovec-rvox (Roctavian).目的:这是上级保健计划(SHP)和Centene Pharmacy Services(CPS)的政策,遵循国家医学必要性审查Valoctocogene Roxaparvovec-Rvox(Roctavian)的政策;过程代码:J1412。与第42 CFR第438.210节和42 CFR第457.1230(D)节一致,必须在包括临床医生管理的药物在内的托管护理合同所涵盖的服务,数量,持续时间,范围和范围,范围和范围不少于同一服务,并且范围为同一服务。尽管MCO可能对药物提出适当的限制,但MCO可能不会使用标准来确定比州计划中使用的医疗需求更具限制性的,即由供应商药物计划开发的。例如,如果成员因MCO先前的授权标准而被拒绝在托管护理中服用药物,但会根据州计划中规定的标准收到该药物,那么MCO的先前授权标准将违反上面提到的金额,持续时间和范围要求。HHSC打算在下一个机会中修改托管护理合同,以包括此要求。同样的标准适用于芯片配方和CAD覆盖范围。此外,这种药物是一种精确的药物。有关临床政策和事先授权要求的更多详细信息,请参阅德克萨斯医疗补助提供商程序手册的门诊药物服务手册。Centene的Precision药物行动委员会(PDAC)为Centene创建了一种标准化的方法,以管理精确药物和其管理的相关费用,然后成员提出要求其中一位代理人的要求。无论是否雕刻,通过,都必须向PDAC报告所有精确的药物请求或潜在请求,以进行跟踪。PDAC UM建议将支持所有精确药物的医疗必要性确定,并根据周转时间的指示和允许使用专家意见。任何提供商的过程代码J1412(用于Roctavian)将限制为每个终生的批准。范围:本政策适用于Centene Pharmacy Services,药房部,医疗董事,索赔
请求ID请求者收到的请求日期...
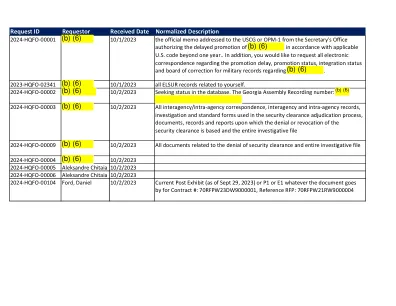
2024 -HQFO -00167 Savage,Colleen 10/2/2023 2018年1月1日至现在,1)电子邮件;短信;即时消息;备忘录;报告;或任何类型的新闻发布信息,涉及地址上的软件包; 2)运输和送货信息,标签和/或通知,该通知将从荷兰发送到美国邮政局的旧金山国际服务中心,该中心涉及包含返回地址的地址; 3) Any and all memos, case reports, phone records, investigation reports, arrest reports, statements, notes or correspondence of any kind pertaining to the investigation and arrest of on October 3, 2019, as well as any and all records that include the name or pertain to the address: 4) This request includes but is not limited to any and all correspondence, writing, electronic mail, messages, requests for testing, and test results generated by any Department of‐Homeland Security employee or outside contractor与5)从2018年1月1日至当前的国土安全部(DHS)拥有或保留的任何写作或信件有关,包括但不限于a)电子邮件;短信;即时消息;备忘录;任何形式的新闻发布信息,由a)或任何与上述2024 -HQFO -00007相关的任何记录撰写,或提及所有记录,Colin Farnsworth 10/3/2023 10/3/2023 Mayorkas秘书,Mayorkas秘书在2021年1月21日通过搜索日期,包括以下任何条件:8 U.S. 8 U.S.§1368(b),第8 U.S.C.§1368(b),8USC§1368(b),8USC§1368(b),8 U.S.C. 1368(b),美国法典8号§1368(b),8USC§1368(b),8USC§1368(b),8 U.S.C.1368(b),美国法典8号1368(b),8 USC 1368(b)和8 USC 1368(b)

真菌ID通过DNA测序形式
*分子病原体和害虫检测实验室没有处理任何或可能包含人类和动物致病真菌的样品。此类样本将被丢弃。用于蘑菇和细长的模具,只提交新鲜而不是腐烂的样品。将每个样品包装在纸袋中。请勿加水或湿纸巾。样本不足可能会阻止及时测试和报告。
食品链ID标准成分表格
食品链ID标准成分表格此表格有助于入学参与者的验证过程。非转基因项目(NGP)标准要求食品链ID评估所有潜在的GMO(*)风险成分,包括高度加工的成分和成分。需要来自供应商的详细信息,并高度赞赏。感谢您的合作。说明:该表格应与最新版本的Adobe Reader一起使用。该成分的制造商应填写,签名并将此表格返回给参与者。反过来,参与者应将完成的表格上传到其记录中。Name of Ingredient: ______________________________________________________________________ Name of Ingredient Manufacturer: __________________________________________________________ 1.该成分95+%认证有机?是否2。是否通过非GMO项目产品验证计划将该成分被验证为产品?是,如果您回答了问题2,请回答问题2.1、2.2和2.3。完成这些问题后,请移至本文档的末尾,然后填写签名部分。还请向客户提供您的NGP证书,如果您回答问题2,请要求此表格,请继续进行问题3。

ID:RAFT SECTORAL EJMISSRON TA/...
• SET 草案将帮助该国实现其 2030 年 NDC 目标。• 与包括相当于 125 MtCO 2 eq 的电力排放水平在内的一切照旧情景相比,SET 草案将导致 2030 年排放量减少 2700 万吨二氧化碳当量 (MtCO 2 eq)(相对于 2022 年 196 MtCO 2 eq 的排放水平,可避免 71 MtCO 2 eq 的温室气体排放)。• 为实现 NDC 的高目标,要求在公布的时间范围内实施 IRP 2019。• IRP 2023 草案表明到 2030 年将过渡到更低的电力系统。• 通过增加投资以在电力和运输部门实施更宏伟的目标,可以实现 NDC 的低目标(350 Mt CO 2 eq)。需要投资来增加对非温室气体排放电力技术的采用,推动货运和客运从公路运输向铁路运输的转变,并加强废物回收利用。• 为了使各行业向低碳未来转型,必须制定新的政策和措施,或强化现有的政策和措施。需要定性标准规范(SET)来指导这一过程,以便未来SET的更新更加严格。
第 25 步兵小队游骑兵战术
1.培训由位于夏威夷斯科菲尔德兵营的第 25 步兵师 HHBN 闪电学院提供。2.说明。第 25 步兵师小型单位游骑兵战术 (SURT) 计划是一项渐进式体能和战术准备计划,旨在让第 25 步兵师士兵在游骑兵学校的游骑兵评估阶段和达比阶段以及课程的其余阶段取得成功。每个课程的最大规模为 50 名游骑兵候选人。3.资格。参加游骑兵学校的所有第 25 步兵师士兵和合作军人。其他机构(包括预备役和国民警卫队人员)必须联系第 25 步兵师 G3 和 USARHAW 学校(通讯:(808) 655-8765)了解名额情况和报名情况。4.先决条件。参加本课程的士兵必须满足本宁堡空降和游骑兵训练旅 (ARTB) 网站列出的所有先决条件,并自愿参加 SURT 计划之后的游骑兵课程。申请者在完成课程后必须有一年的现役服役时间。5.地点/时间。闪电学院教学楼(大楼。8021, 2491 California Ave, Wahiawa, HI 96857-5000),每门课程第 0 天 NLT 1300 小时。课程第一天将在 Weyand Field 进行,报告时间为 0530 小时。6.行政。
Jonathan E. Drill - 律师 ID: 019911983
Jonathan E. Drill - 律师 ID:019911983 STICKEL, KOENIG, SULLIVAN & DRILL, LLC 571 Pompton Avenue Cedar Grove, New Jersey 07009 电话:(973) 239-8800 传真:(973) 239-0369 电子邮件:jdrill@sksdlaw.com 宣告原告律师 麦迪逊自治市

了解您的健康计划身份证
以下是加利福尼亚州科恩县高级法院健康计划 ID 卡的样本和说明。ID 卡可能因所选计划覆盖范围而异。如果您对 ID 卡有疑问或需要其他卡,请拨打 800-442-7247 联系 HealthComp。ID 卡正面:

id/eprint/3803/ - LBS 研究在线
摘要 为了帮助小公司获得银行融资,大型卖家通常会策划联合融资计划,将其小经销商与大型银行联系起来,大型银行根据卖家提供的信息向所有参与的经销商提供贷款。我们研究了这种卖家策划的融资计划下的供应链决策(定价和库存)和贷款条款。在贷款定价中,我们强调了一种在这种计划下尤为重要的金融摩擦形式——银行资本监管。银行在全球范围内被要求维持监管资本以减轻不可预见的贷款损失,使用标准化方法(监管资本是贷款金额的固定百分比)或内部评级 (IRB) 方法(取决于贷款的风险价值)。我们考虑一个博弈论模型,该模型由一个大型卖家和多个资本受限的报童型经销商组成,他们从受资本监管的银行获得融资。卖方决定批发价格以及是否与银行合作为经销商制定联合融资计划,经销商选择库存水平和融资渠道。我们发现,只有当银行采用内部评级法且经销商风险较低时,卖方才应该制定联合融资计划。当经销商之间的需求相关性较低且经销商数量较多时,此类计划对卖方更有利可图。虽然这些计划总是使卖方受益,但可能会损害中等风险的经销商。面对财务状况各异的经销商,联合融资计划的条款应设计为财力雄厚的经销商补贴财力薄弱的经销商。最后,允许卖方分担部分贷款损失可以进一步提高联合融资的绩效,但前提是卖方的资本机会成本较低。我们的研究结果为大型卖家如何协调联合融资计划以及小型经销商如何做出相应的运营决策提供了指导。