机构名称:
¥ 1.0
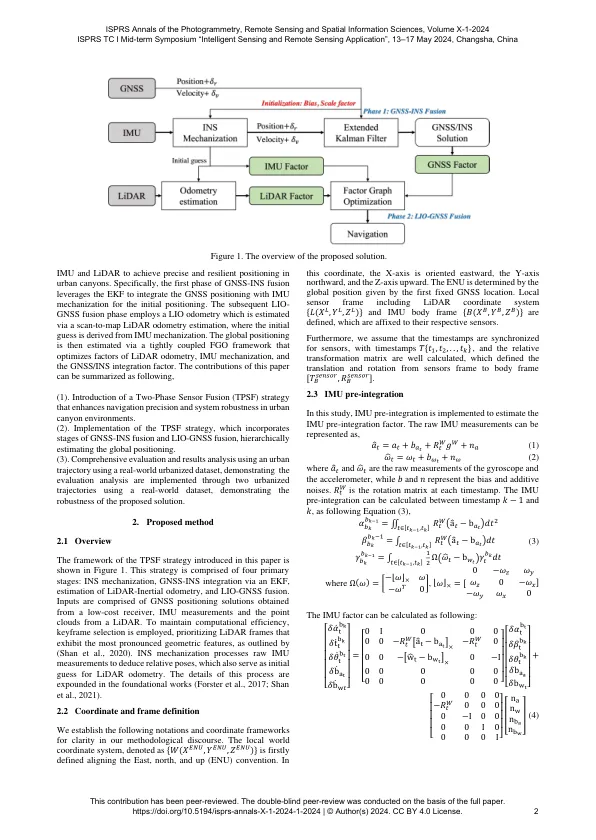
摘要在精确导航方面的最新进展已广泛利用全球导航卫星系统(GNSS)和惯性导航系统(INS)的集成,尤其是在智能车辆的领域。然而,这种导航系统的功效被非光(NLOS)信号的反射和多径中断所损害。基于积极的感知传感器以其精确的3D测量而闻名的基于主动感知的传感器的光检测和范围(LIDAR)的探测器在增强导航系统方面已经变得越来越普遍。尽管如此,与GNSS/INS系统的激光雷达进气量同化列出了重大挑战。应对这些挑战,这项研究引入了两相传感器融合(TPSF)方法,该方法通过双阶段传感器融合过程协同结合了GNSS定位,激光镜和IMU预融合。初始阶段采用扩展的Kalman滤波器(EKF)与IMU机械化合并GNSS解决方案,从而促进了IMU偏见和系统初始化的估计。随后,第二阶段将扫描到映射激光雷达的进程与IMU机械化相结合,以支持连续的LiDAR因子估计。然后将因子图优化(FGO)用于liDar因子,IMU预融合和GNSS解决方案的全面融合。通过对城市化开源数据集的苛刻轨迹进行严格的测试来证实所提出的方法的功效,与最先进的算法相比,该系统表明性能的增强,可实现1.269米的翻译标准偏差(STD)。
一种新型的Lidar-Gnss-Ins两相紧密耦合的集成方案,用于精确导航
主要关键词


相关文件推荐