机构名称:
¥ 1.0
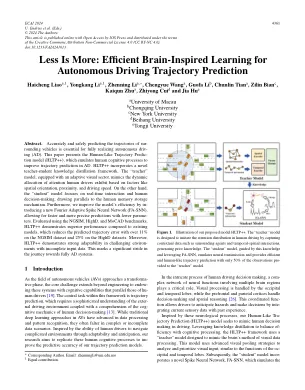
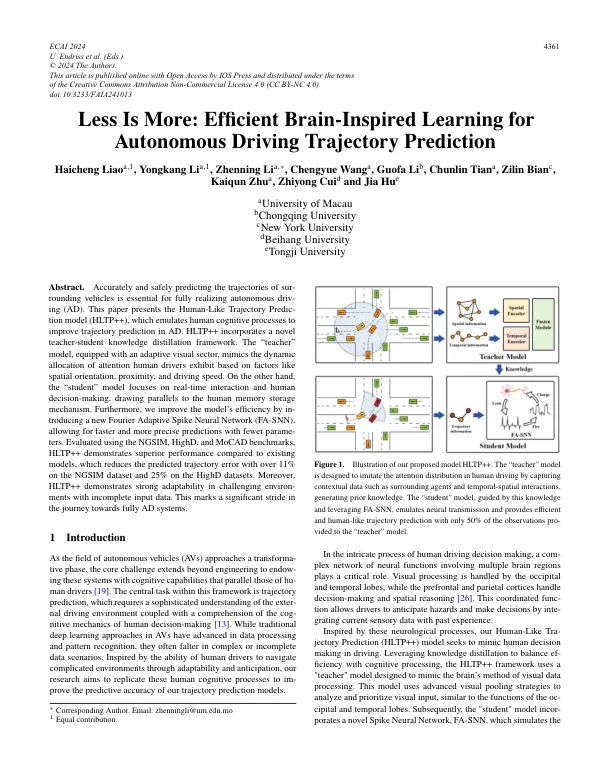
摘要:准确安全地预测周围车辆的轨迹对于完全实现自动驾驶 (AD) 至关重要。本文提出了类人轨迹预测模型 (HLTP++),该模型模拟人类的认知过程以改进 AD 中的轨迹预测。HLTP++ 采用了一种新颖的师生知识提炼框架。配备自适应视觉区的“老师”模型模仿人类驾驶员根据空间方向、距离和驾驶速度等因素表现出的注意力动态分配。另一方面,“学生”模型侧重于实时交互和人类决策,与人类的记忆存储机制相似。此外,我们通过引入新的傅里叶自适应脉冲神经网络 (FA-SNN) 来提高模型的效率,从而可以用更少的参数进行更快、更精确的预测。使用 NGSIM、HighD 和 MoCAD 基准进行评估,HLTP++ 表现出比现有模型更优异的性能,在 NGSIM 数据集上将预测轨迹误差降低了 11% 以上,在 HighD 数据集上将预测轨迹误差降低了 25%。此外,HLTP++ 在输入数据不完整的具有挑战性的环境中表现出很强的适应性。这标志着在实现完全 AD 系统的过程中迈出了重要一步。
面向自动驾驶的高效脑启发学习...
主要关键词


相关文件推荐




























