机构名称:
¥ 1.0
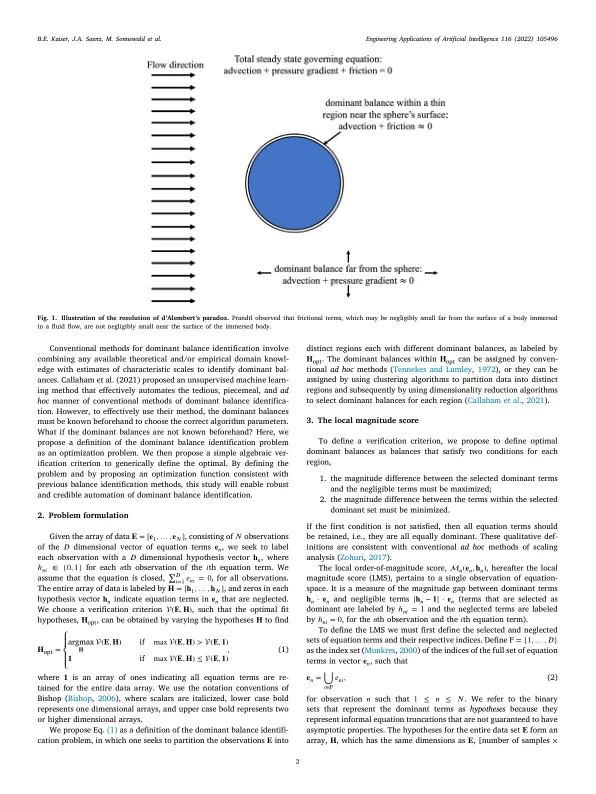
识别局部和近似主导动态系统行为的过程,使理解和建模非线性微分动态系统取得了重大进展。主导过程识别的传统方法涉及零碎和临时(非严格、非正式)缩放分析,以识别控制方程项的主导平衡并描绘每个主导平衡的时空边界(空间和/或时间边界)。我们首次提出了一个客观的全局度量,以衡量主导平衡与观测值的拟合度,这对于自动化来说是理想的,而且以前是未定义的。此外,我们以优化问题的形式提出了主导平衡识别问题的正式定义。我们表明,优化可以通过各种机器学习算法执行,从而实现主导平衡的自动识别。我们的方法与算法无关,它消除了对专家知识的依赖,可以识别事先不知道的主导平衡。
自动识别主要物理过程
主要关键词

相关文件推荐