机构名称:
¥ 2.0
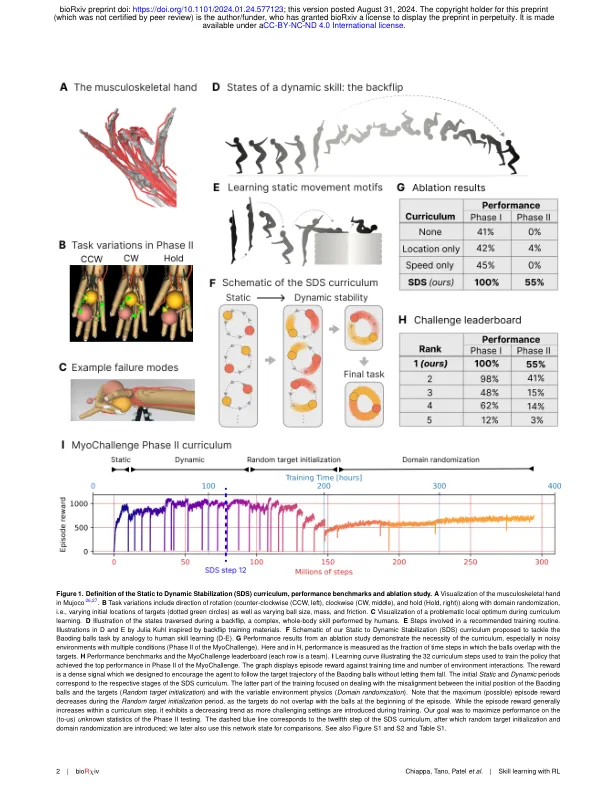
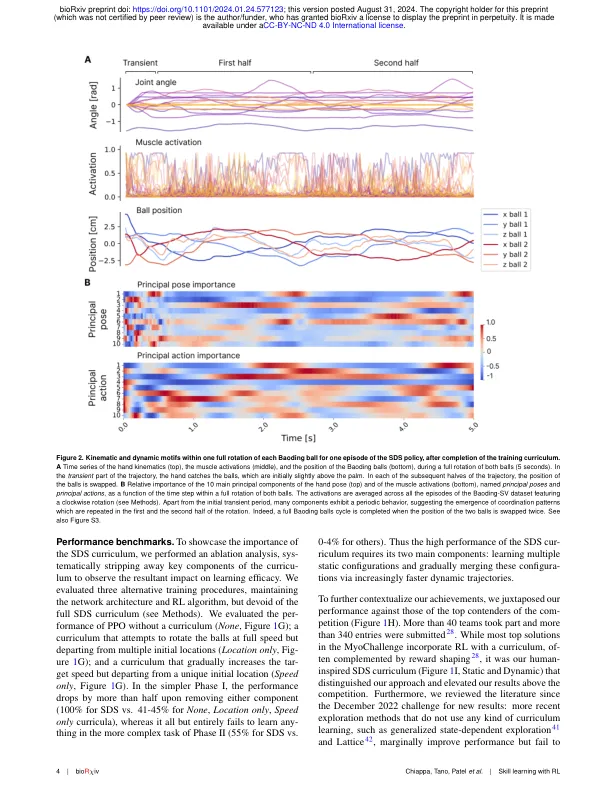
有效的肌肉骨骼模拟器和强大的学习算法提供了计算工具,以应对理解生物运动控制的大范围。我们为首届神经玻璃舞的获奖解决方案利用了一种反映人类技能学习的方法。使用一种新型的曲调学习方法,我们训练了一个经常性的神经网络,以控制人类手的逼真模型,并用39个肌肉在手掌上旋转两个baoding球。与人类受试者的数据一致,即使没有明确偏向低维解决方案,该政策使少数运动学协同作用。但是,通过选择性地灭活控制信号的部分,我们发现比传统协同分析所建议的更大的尺寸有助于任务性能。总的来说,我们的工作说明了肌肉骨骼物理引擎,增强学习和神经科学的界面上的新兴可能性,以促进我们对生物运动控制的理解。
通过基于课程的强化学习获得肌肉骨骼技能
主要关键词



相关文件推荐