机构名称:
¥ 1.0
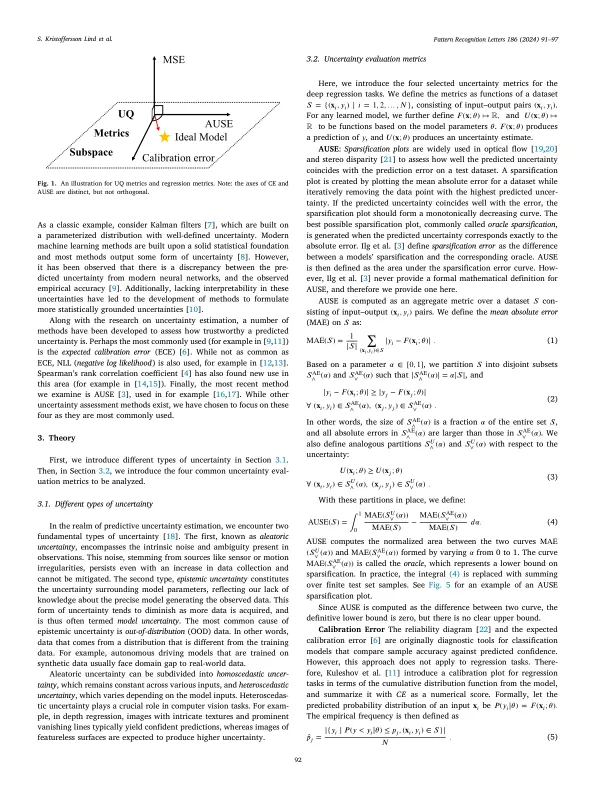
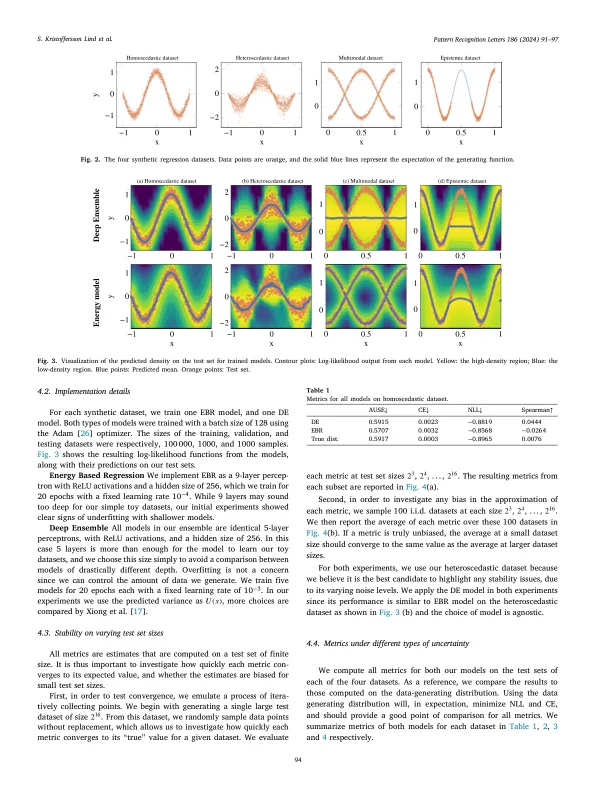
在机器人或其他物理系统上部署深层神经网络时,学到的模型应可靠地量化预测性不确定性。可靠的不确定性允许下游模块推理其行动的安全性。在这项工作中,我们解决了不确定性量化的指标。具体来说,我们专注于回归任务,并研究稀疏误差(AUSE),校准误差(CE),Spearman的等级相关性和负模样(NLL)下的区域。使用多个数据集,我们研究了这些指标在四种典型类型的不确定性下的行为,它们在测试集的大小上的稳定性以及揭示其优势和缺点。我们的结果表明,校准误差是最稳定,最容易解释的度量,但是Ause和NLL也具有各自的用例。我们不建议您评估不确定性的Spearman等级相关性,并建议用Ause代替它。
基于自主地面车辆的基于增强学习的运动计划深度回归的不确定性定量指标
主要关键词


相关文件推荐