机构名称:
¥ 1.0
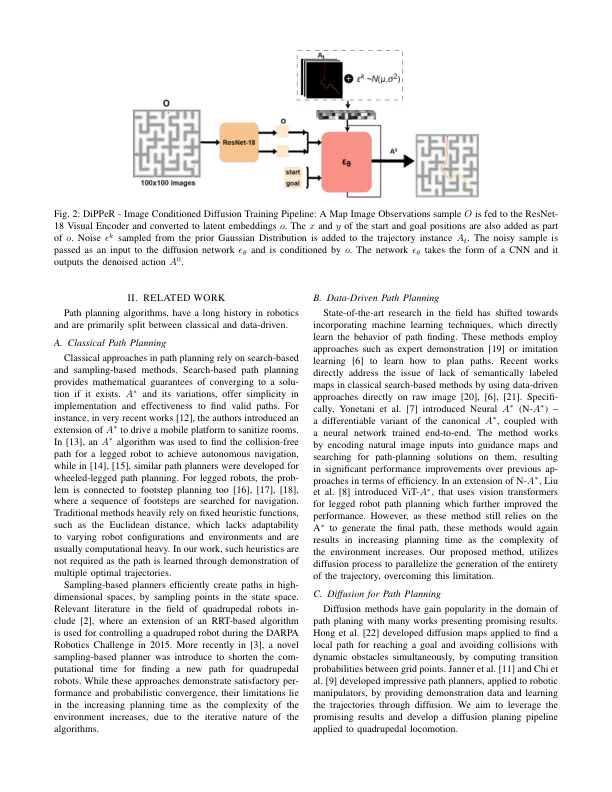
摘要 - 在这项工作中,我们提出了北斗七星,这是一个新颖而快速的2D路径计划框架,用于四足动物,利用扩散驱动的技术。我们的贡献包括用于MAP图像和相关轨迹的可扩展数据集生成器,用于移动机器人的图像调节扩散计划器以及采用CNN的训练/推理管道。我们在多个迷宫以及波士顿Dynamic的现场和Unitree的GO1机器人的现实部署方案中验证了我们的方法。北斗七星的轨迹生成平均比基于搜索和数据驱动的路径计划算法的速度快23倍,在产生可变长度的可行路径和障碍物结构中,平均一致性为87%。网站:https://rpl-cs-ucl.github.io/dipper/
基于扩散的2D路径计划器应用于腿机器人
主要关键词



相关文件推荐