机构名称:
¥ 1.0
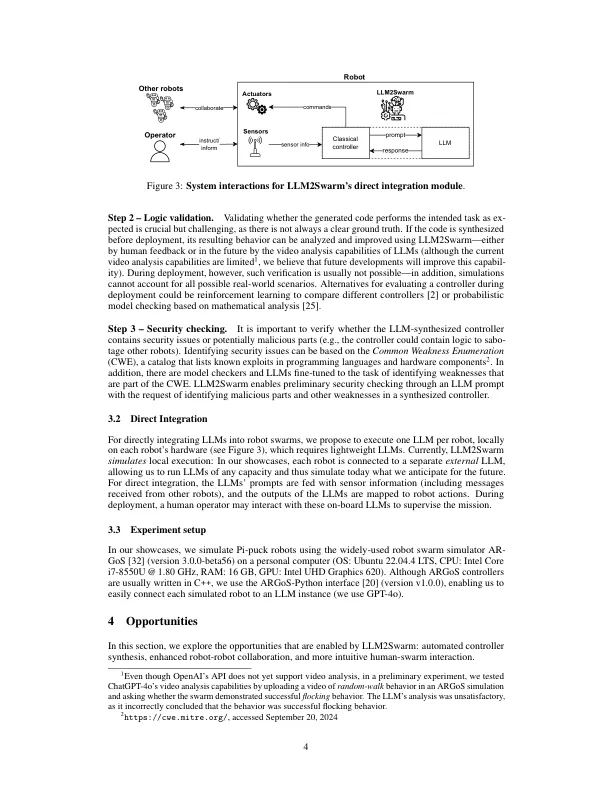
机器人群是由许多简单的机器人组成的,这些机器人可以交流和劳动以完成复杂的任务。机器人控制器通常需要由专家通过编程代码在情况下指定。此过程很耗时,容易出错,并且无法考虑部署期间可能遇到的所有情况。另一方面,最近的大型语言模式(LLMS)已展示了推理和计划功能,引入了与互动和编程机器进行交互的新方法,并纳入了特定领域和常识性知识。因此,我们建议通过将LLM与机器人群集成并展示概念证明的潜力(展示)来应对上述挑战。为此,我们探索了两种方法。第一种方法是“间接集成”,其中LLM用于合成和验证机器人控制器。这种方法可能会减少开发时间和部署前的人为错误。此外,在部署期间,它可以用于现实的新机器人行为。第二种方法是“直接集成”,每个机器人在部署机器人协作和人类处理交互期间本地执行单独的LLM实例。这些本地LLM实例使每个机器人都能使用自然语言进行推理,计划和协作,就像我们的展示案例中所阐述的那样,机器人能够检测到各种异常,而没有有关这些异常性质的事先信息。为了进一步研究我们的主要概念贡献,我们为LLM2SWARM系统发布了软件和视频:https://github.com/pold87/llm2swarm。
llm2swarm:机器人群体响应地推理,计划...
主要关键词

相关文件推荐