机构名称:
¥ 1.0
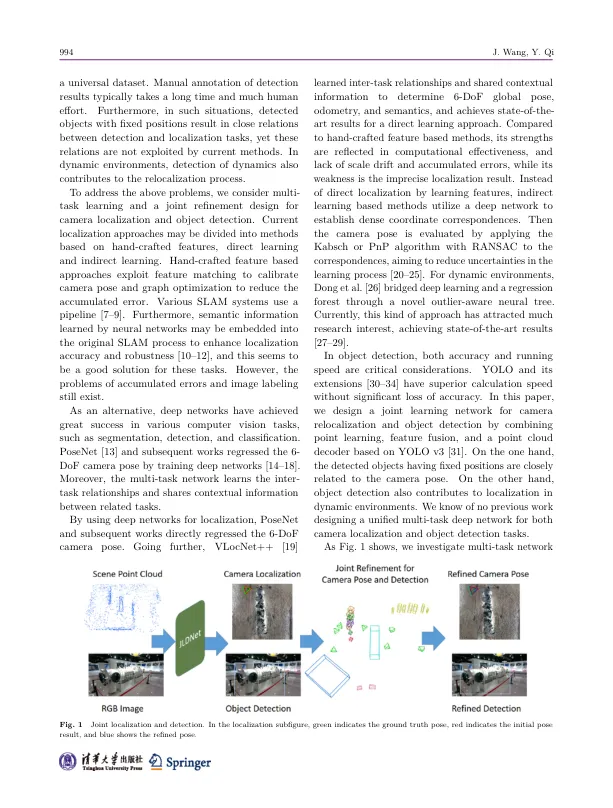
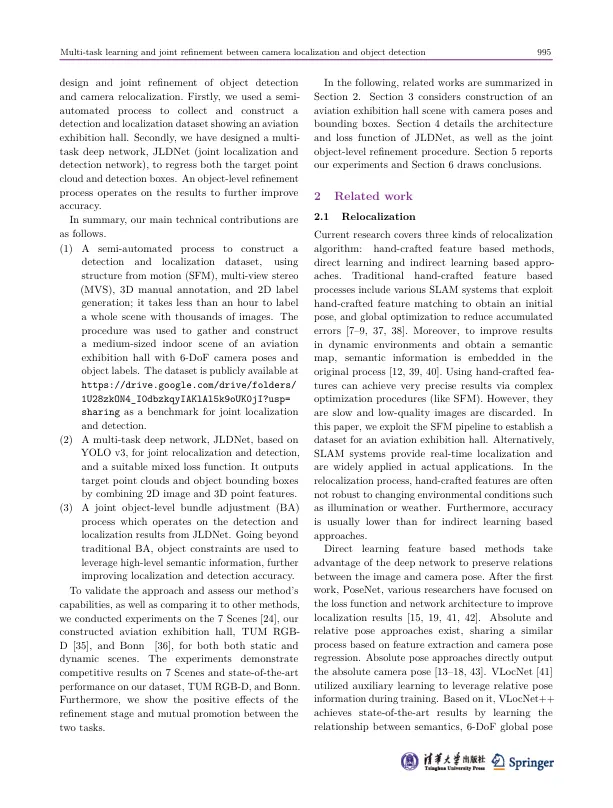
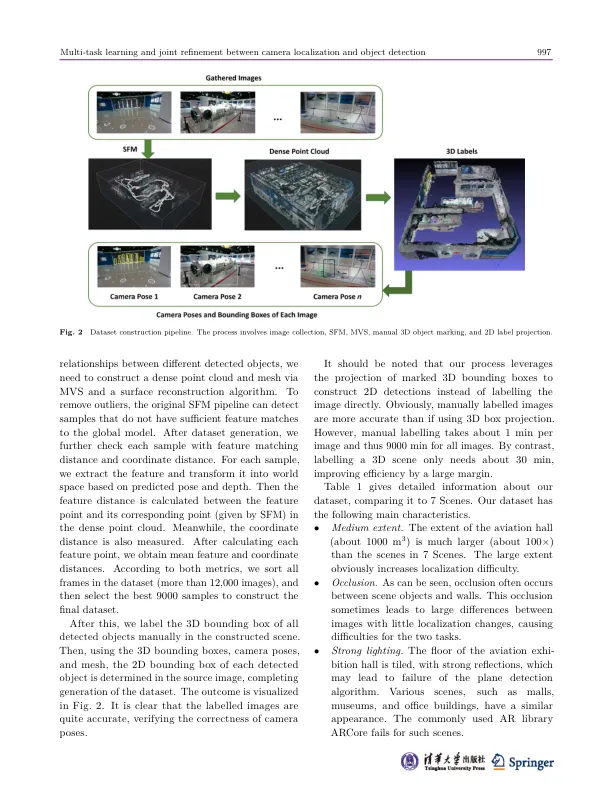
抽象的视觉定位和对象检测在各种任务中都起着重要作用。在许多室内应用方案中,某些检测到的对象具有固定位置,这两种技术紧密合作。但是,很少有研究人员同时考虑这两个任务,因为缺乏数据集以及对这种环境的很少关注。在本文中,我们探讨了检测和本地化的多任务网络设计和关节重新确定。 为了解决数据集问题,我们通过半自动程序构建了一个室内室内场景。 数据集提供本地化和检测信息,并在https:// drive.google.com/drive/folders/1u28zkon4_i0db zkqyiaklal5k9ouk0ji? 针对此数据集,我们基于Yolo V3设计了一个多任务网络JLDNet,该网络输出了目标点云和对象边界框。 对于动态环境,检测分支还促进了动力学的感知。 JLDNET包括图像功能学习,点功能学习,功能融合,检测构建和点云回归。 此外,使用对象级束调整来进一步提高定位和检测准确性。 要测试jldnet并将其与其他方法进行比较,我们已经在7个静态场景上进行了实验,我们的在本文中,我们探讨了检测和本地化的多任务网络设计和关节重新确定。为了解决数据集问题,我们通过半自动程序构建了一个室内室内场景。数据集提供本地化和检测信息,并在https:// drive.google.com/drive/folders/1u28zkon4_i0db zkqyiaklal5k9ouk0ji?针对此数据集,我们基于Yolo V3设计了一个多任务网络JLDNet,该网络输出了目标点云和对象边界框。对于动态环境,检测分支还促进了动力学的感知。JLDNET包括图像功能学习,点功能学习,功能融合,检测构建和点云回归。此外,使用对象级束调整来进一步提高定位和检测准确性。要测试jldnet并将其与其他方法进行比较,我们已经在7个静态场景上进行了实验,我们的
相机之间的多任务学习和联合改进...
主要关键词


相关文件推荐