机构名称:
¥ 4.0
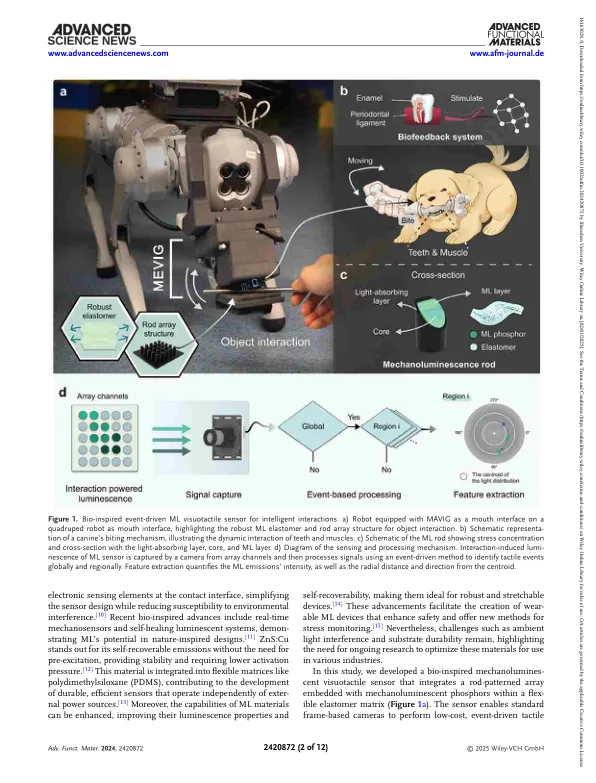
事件驱动的传感器对于实时应用至关重要,但是当前技术的集成面临着诸如高成本,复杂信号处理和噪声脆弱性之类的限制。这项工作引入了一个由生物启发的机械发光视觉传感器,该传感器使标准基于框架的摄像头能够通过仅在机械应力下发射光执行事件驱动的传感,从而充当事件触发器。从犬齿的生物力学中汲取灵感,传感器利用杆状图案阵列来增强机械发光信号灵敏度并扩大接触表面积。此外,设计支持机器学习的算法旨在实时准确分析相互作用触发的机械发光信号。传感器被整合到四倍的机器人的口腔界面中,显示出增强的交互式功能。该系统成功地分类了八个互动活动,平均精度为92.68%。综合测试验证了传感器在捕获动态触觉信号并扩大与环境相互作用时机器人的应用范围时的效率。
智能相互作用的由生物启发的事件驱动的机械发光传感器
主要关键词


相关文件推荐