机构名称:
¥ 1.0
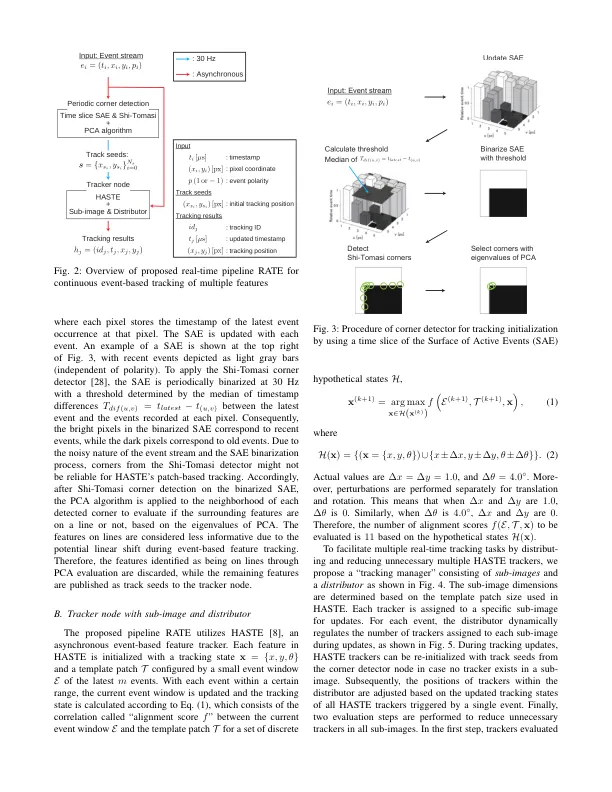
摘要 - 基于视觉的自定位是一种至关重要的技术,用于在GPS剥夺环境中实现自主机器人导航。但是,标准帧摄像机会受到运动模糊的影响,并且动态范围有限。这项研究着重于使用基于事件的摄像机进行自定义的有效特征跟踪。这样的摄像机不提供环境的常规快照,而是异步收集与每个像素中每个像素中一小部分照明的事件,从而解决了在快速运动和高动态范围内运动模糊问题的问题。特别是,我们提出了一个基于连续的实时异步性异步跟踪管道,名为速率。此管道集成了(i)使用活动事件表面的时间切片连续初始化跟踪器,以及(ii)带有建议的“跟踪管理器”的跟踪器节点,由基于网格的分销商组成,以减少冗余跟踪器并删除差质量差的质量。使用公共数据集进行评估表明,我们的方法保持了稳定的跟踪功能,并且与仅限的事件跟踪方法相比,在维护甚至改进跟踪准确性的同时,进行实时跟踪有效。我们的ROS实施以开放源为:https://github.com/mikihiroikura/rate
速率:带有事件摄像机的实时异步跟踪
主要关键词



相关文件推荐