机构名称:
¥ 1.0
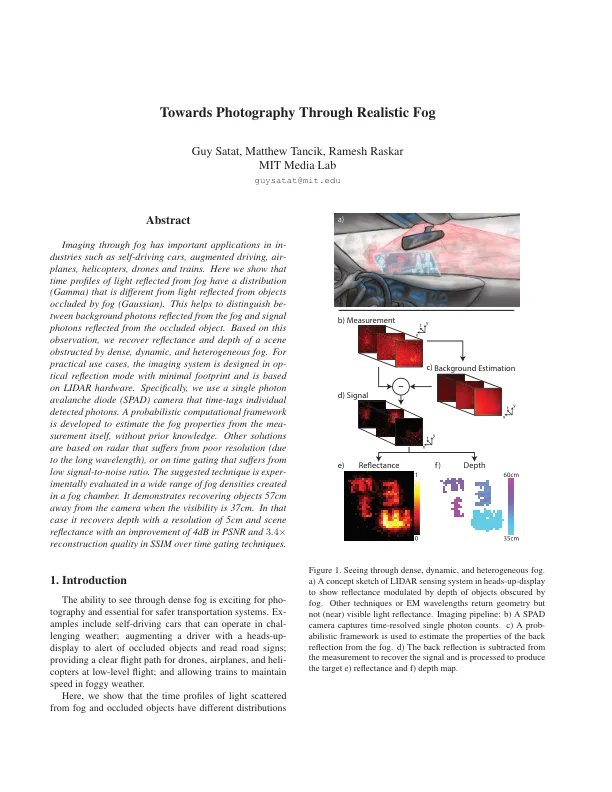
通过雾进行成像在诸如自动驾驶汽车,增强驾驶,飞行飞机,直升机,无人机和火车等工具中具有重要的应用。在这里我们表明,从雾反射的光的时间填充具有分布(伽马),该分布与从雾(高斯)遮住的物体所反映的光中不同。这有助于区分背景光子与雾和信号光子从遮挡物体反射的信号光子之间。基于此观察结果,我们恢复了被密集,动态和异质雾阻塞的场景的反射和深度。对于实际用例,成像系统以最小的占地面积为单位的反射模式设计,并基于LiDAR硬件。特别是,我们使用单个光子雪崩二极管(SPAD)摄像机,该摄像头将计入单个检测到的光子。在没有先验知识的情况下,开发了一个概率计算框架,以估计雾化本身的雾性特性。其他解决方案是基于雷达的,该雷达遭受分辨率较差(由于长波长)的障碍,或者按时门控遭受较低的信噪比。建议的技术在雾室中产生的多种雾密度中进行了实验评估。它在可见度为37厘米时演示了离相机57厘米的恢复对象。在这种情况下,它以5厘米的分辨率恢复了深度,并且场景反映了PSNR和3的4DB的反射。4×SSIM的重建质量随时间推移门控技术。4×SSIM的重建质量随时间推移门控技术。
通过逼真的雾对摄影
主要关键词



相关文件推荐